标题:
自由摆平板控制系统的分析与设计2
[打印本页]
作者:
rise_ming
时间:
2013-8-1 22:02
标题:
自由摆平板控制系统的分析与设计2
2.2 系统的工作流程
系统硬件设计平板转动后,通过传感器形成的加速度值经过A/D转换,作为单片机的输入数据,原理图如图3所示。单片机STC12C5A16 S2利用其I/O口,输出信号来驱动DDS模块,产生频率精确、宽度可调的脉冲信号。该脉冲信号可使高细分两相混合式步进电机驱动芯片THB6128驱动42BYGH4417完成步进运行,原理图如图4所示。从而实现对电机转速、转向、启停等多种工作状态的快速准确控制,最终使平板达到自由摆系统中的规定位置。我们利用按键来选择不同的工作模式,利用LCD显示角度传感器的数值,各个功能完成时利用LED指示结束。
2.2 平板随着摆杆的摆动而旋转
单片机STC12C5A16S2采用内部定时器方式2工作,获得不同周期的时钟,T=(2s-N)/SYCLK。
自由摆周期摆动时,平板需在单个周期内完成360°旋转。由自由摆摆动周期
可知,摆长L=1m,当地重力加速度g=9.76m/s,则摆动周期T=2.011s。
两相四线混合式步进电机42BYGH4417利用芯片THB6128对其步距角进行细分。步距角为1.8°,细分数为A,则步进电机转动角度a°时,PWM脉冲个数N=a*A/1.8。步进电机脉冲数为N时,脉冲频率f与转动时间T间的关系为N=f*T。
综上所述,若细分数A=128,则DDS模块需要产生频率f=12.73kHz的脉冲信号,通过单片机内部定时器编程即可实现。考虑到外界压力、空气阻力等状况,可多次试验调试,适当增加频率f即可实现单摆一个周期摆动时,平板旋转一周。
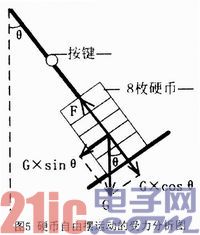
2.4 硬币的稳定控制
我们在平板上叠放8个一元的硬币,当单摆从角度θ开始摆动时,控制平板由水平快速同步到图5所示位置,则硬币整体受到一个竖直向下的重力和始终沿杆方向变化的支持力,将这些力沿垂直和平行于速度方向进行分解。其中,垂直于速度方向上的力使硬币的速度方向发生改变,充当硬币绕悬点做变速圆周运动的向心力。平行于速度方向上的力使硬币的速度大小发生改变,充当摆球的回复力。在此种情况下即可保证硬币随摆杆摆动而不滑落。为了达到放手后平板快速同步,我们将开启开关安装在摆杆上,放手即开启。
2.5 激光笔的定位
开启系统,让平板上的激光笔初始化到指定中心线位置。当摆杆被推到角度θ时,角度传感器将偏离角度读入到单片机,要完成快速定位,激光笔需旋转角度γ,如图6所示。
经计算可知,当摆杆处于近离中心线位置(左图)时,
;当摆杆处于远离中心线位置(右图)时,
。
设定t秒完成定位,则利用平板随摆杆的摆动而旋转中所示方法,可得PWM脉冲个数,从而得到DDS模块需要产生的脉冲频率,通过单片机内部定时器方式2工作,完成DDS的输出。
欢迎光临 电子技术论坛_中国专业的电子工程师学习交流社区-中电网技术论坛 (http://bbs.eccn.com/)
Powered by Discuz! 7.0.0