标题:
具有颜色识别功能的类人机器人设计3
[打印本页]
作者:
rise_ming
时间:
2013-8-1 22:15
标题:
具有颜色识别功能的类人机器人设计3
如上所述,最佳阈值的判断标准是使得类间方差最大。于是通过遍历每一个灰度值,并计算其划分带来的类间方差,总能找到一个合适的阈值满足条件。由于式(4)计算二阶中心矩计算量较大,考虑到:
显然,式(6)只需要计算类内均值,即一阶矩。于是最大化
就转化为最大化式(6)。
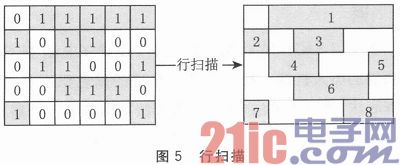
接下来的工作就是对图像进行标定,这里所指的标定就是根据二值化后的图像,计算出目标区域的外接矩形位置。在目标构成比较简单的情况下,投影法是效率最高的方法,而当场景中存在多个目标时,多数情况下需要进行连通域计算。拓扑学中把连通性定义为,区域内任意两点之间存在至少一条曲线可以将两者连接。目前的连通域标记方法主要分两类:扫描法和轮廓跟踪法。扫描法的基本思路是逐个检查每个像素的值和连通性,从而获得所有的连通性描述信息,然后根据每点之间的相互关系计算出最后的区域个数和构成关系。基于扫描的连通标记演示如下(以8连通为例):
首先对二值图像进行行扫描得到线段连通标记,如图5所示。然后检查每行之间线段与上一行线段之间的连通关系,并更改标记。
第1行:线段1创建标记A。
第2行:线段2、1之间连通,线段2标记为A;线段3同理标记为A。
第3行:线段4、2之间连通,线段4标记为A;线段5创建标记为B。
第4行:线段6、4之间连通,线段6标记为A;线段6、5之间连通,将线段5的标记由B变为A。
第5行:线段7创建标记B;线段8、6之间连通,线段8标记为A。结果如图6所示。
将图像标定完毕可以去掉图像中的噪点,并且找到目标的中心,实现目标的定位。
3 实验与结果分析
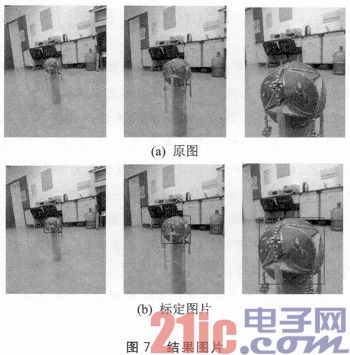
将控制卡装到机器人上,控制机器人运动,在运动中摄像头采集图像,并且用方框将目标进行标定。利用上述颜色识别算法对图红色绣球进行标定,得到如图7所示的结果。
随着机器人的运动,绣球在图像中的位置发生变化,机器人根据标定结果,就可以得到绣球的位置,根据位置调整自己的运动准确找到绣球。图像采集的速度达到15帧/s,舵机控制准确度达到0.32°,可以圆满完成比赛任务。
结语
本文以S3C6410作为主控芯片,设计了具有视觉识别功能的类人机器人控制系统。改进的颜色识别算法利用查表法、类间方差法、连通域等方法对图像进行处理,取得了良好的视频识别效果。实践证明,由该控制系统的设计方案制作而成的类人机器人,具有良好的自主控制稳定性和较好的视觉识别能力,能够较出色地完成比赛。
欢迎光临 电子技术论坛_中国专业的电子工程师学习交流社区-中电网技术论坛 (http://bbs.eccn.com/)
Powered by Discuz! 7.0.0