标题:
基于磁阻传感器的车流量检测系统应用设计
[打印本页]
作者:
Bazinga
时间:
2014-10-14 20:05
标题:
基于磁阻传感器的车流量检测系统应用设计
本文介绍了一种基于磁阻传感器的车流量检测系统,磁阻传感器能将车辆引起的地磁扰动转换为清晰的电压信号输出。该系统包含了信号放大模块、无线通信模块等,多个地磁传感器节点通过无线通信模块与计算机系统相连,将检测到的车流信息反馈到上位机,从而实现对整个路口车流的检测。
1.引言
如何缓解城市交通拥堵、提高道路通行能力已经成为当前迫切需要研究解决的课题。如果可以根据各车道车流量来实现对交通信号灯的智能化控制,合理地分配交通信号灯控制时间,那么就可以提高交通系统效率,缓解交通拥堵现象。为获取车流量相关数据必须设计一个道路车流量检测系统。针对车流量检测系统的需求,本文介绍了磁阻传感器车流量检测原理,采用双轴磁阻传感器HMC1022和无线通信模块技术设计了一种车流量检测系统。
2.检测原理
地磁车辆检测器是基于磁阻传感器的车辆检测技术,具有尺寸小、安装方便、对非铁磁性物体无反应、可靠性高等特点。磁阻传感器主要利用镍铁导磁合金的磁阻效应。磁阻传感器的基础元件是惠斯通电桥,组成电桥的电阻由镍铁导磁合金材料制成,该电阻的电阻值与偏置电流和磁场矢量之间的夹角存在一定的函数关系。
地球磁场强度很弱,在最强的两极其强度不到1mT,平均强度约为0.06mT.车辆本身含有的铁磁物质会对车辆存在区域的地磁信号产生影响,使车辆所在区域的地球磁力线发生弯曲。在一个有限的空间里,地球磁场可以看成是均匀的,当这个均匀磁场被铁磁性材料(如铁、钢、镍、钴等)扰动时,它的均匀性就会受到破坏。当车辆经过传感器附近,传感器能够灵敏感知到信号的变化,经信号分析就可以得到检测路面的车流信息。
3.硬件设计
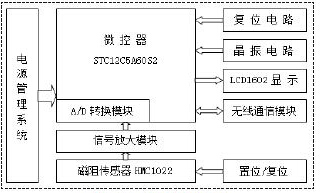
本设计是以STC12C5A60S2单片机为控制基础,以HMC1022为信息采集传感器的单节点分布式车流量信息采集与控制系统。传感器节点由双轴磁阻传感器HMC1022、XL02-232AP1无线通信模块和电源组成。与HMC1001/1002、其他三轴磁阻传感器相比,HMC1022具有更低功耗,同时减少了周边电路,节点最大能量主要消耗在无线发送与接收数据时刻。多个地磁传感器节点通过串口无线通信模块与计算机系统相连,将检测到的车流信息反馈到上位机,从而实现对整个路口车流量的检测。该系统包含了信号放大模块、无线通信模块、A/D转换模块、传感器置位/复位模块等。车流量检测系统硬件的设计框架图如图1所示。
图1 系统硬件结构框图
3.1无线通信模块
本文选用Honeywell生产的一种双轴磁阻传感器HMC1022,其具有体积小、灵敏度高、价格低、稳定性好等优点。HMC1022灵敏度可达1mV/V/Gs,线性误差为0.1%,滞后误差和可重复性误差也都很小,可以达到0.05%.
由于磁阻传感器大约仅有几米的检测范围,而且磁场信号强度随着距离增大而线性衰减。实际应用中,我们通常将传感器置于车道中间。为了不影响交通的正常运行,本文采用XL02-232AP1无线通信模块,该模块采用高性能工业级单片机,其抗干扰性好,通信稳定可靠。其通信信道为半双工,可用于点对点通信,使用简单,模块正常工作时默认在数据接收状态。本设计使XL02-232AP1模块工作在一点对多点的通信方式,这种通信方式需设置一个模块为主站,其余为从站,各个站都预设有一个唯一的地址码,并且主站默认处于接收状态,所有的从站默认都处于发送状态。各从站皆采用带地址码的数据帧发送数据或命令,主站接收全部从站发送的数据帧,并根据接收到的数据的地址码判断是哪个车道检测点发送的数据,进而进行相应的交通灯信号控制。这些工作通过上层协议来完成,可保证主站及时接收到从站发送的数据,以免相互干扰,造成丢帧现象。
XL02-232AP1无线通信模块采用+5V的直流电源供电,最大工作电流不超过60mA,电源可以和其他设备共用,但要注意电源的质量和接地的可靠性。随着中国光伏产业的快速发展,可以考虑采用太阳能为该系统供电。使用时将无线通信模块的数据输出端TxD接单片机的数据输入端RxD,模块的数据输入端RxD接单片机的数据输出端TxD.模块的SET端为设置参数状态端口,进入设置模式时,需先将此端口拉低,再给模块上电,此时绿灯长亮,进入设置模式。参数设置好后,平时正常工作时将该端口悬空即可。
3.2传感器置位/复位模块
当磁阻传感器暴露于干扰磁场中,容易受到大磁场的干扰影响。当磁阻传感器的检测磁场超出±6Gs范围,传感器的输出将不再保持线性关系,其灵敏度也将随之降低,从而引起输出信号的衰变,将无法准确检测弱信号磁场。为避免这种情况出现,影响检测精度,将脉冲信号施加到HMC1022芯片自带的内集成置位/复位电流带,以恢复其原来的高灵敏度。
本设计中MOSFET开关管选用增强型高压场效应管AO4606.由单片机定时器模块在每隔100ms的高电平后产生一个不小于2us脉宽的低电平时钟信号,从而切换MOS管的导通和截止,产生可控制置位/复位电流带的脉冲信号。
4.算法实现
鉴于该系统要求传感器节点的检测数据能通过无线通信模块与上位机进行实时通讯,且单片机存储空间有限,车流量检测算法不能消耗单片机太多存储空间和计算时间。Ding等提出多中间状态机算法,该算法计算简单、精度高,并且能在单片机运行过程中得到实时结果。
多中间状态机包括5个状态:nocar、car、count0、count00以及count1.输入为u(k),中间状态为count0、count00,输出为car、nocar.
首先,将磁阻传感器HMC1022检测到的信号通过平均处理算法处理后得到f(k),再将f(k)转换为二值化信号u(k)作为状态机输入,并设定阀值T(k),当f(k)≥T(k)时,u(k)=1,当f(k)<T(k)时,u(k)=0.状态机中的有车计数器count1、干扰计数器count0和车辆离开计数器count00分别设置有一个计数器,并设定其阀值分别为N、M、M,当计数小于M时为干扰,大于M时表示车辆离开,此时为避免由于外界磁场环境变化或磁阻传感器温度变化引起输出信号漂移,将所有计数器的值均置0.改进后的状态机算法如图4所示。
与单中间状态机算法相比,多中间状态机算法不仅可以判断车辆何时进入检测区,而且增加了判断车辆离开检测器的中间状态,能够更好地从时间序列中提取车辆信息,因此,能有效避免由于干扰造成的误判。
5.测试与结论
本检测系统的实验结果是在道路现场进行实地测试得到的。根据检测点安放位置不同、传感器敏感轴的安置方向不同等多种情况分别进行测试,采集相应磁场信号变化信息,并进行分类对比与分析。
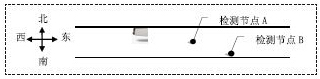
检测节点A和检测节点B分别安置于车道中央和车道边缘,车辆行驶方向为从西至东,如图2所示。改变磁阻传感器敏感轴X轴的方向,以X轴正方向为标志,使其分别朝向东、西、南、北方位,测试来车时该检测节点的磁场变化。
图2 检测节点位置图
对比分析检测节点A和检测节点B的测试波形,可发现当车辆从检测节点上方通过时,检测值有着明显的变化,而车辆从检测节点旁边通过时,检测值虽有变化,但不明显。根据此不同变化特征,可将检测节点安置于道路各车道中央,既可以精确地辨别该车道是否有车辆经过,又可以有效地防止旁边车道车辆经过时引起的干扰,避免误检现象发生。
6.结束语
实验证明,该车流量检测系统对车辆具有很好的检测效果,同时算法简单,运行速度快,适合应用于单片机上。检测系统具备传感器节点成本低、体积小、无须布线等特点,可广泛应用于智能交通领域的车辆检测。
欢迎光临 电子技术论坛_中国专业的电子工程师学习交流社区-中电网技术论坛 (http://bbs.eccn.com/)
Powered by Discuz! 7.0.0