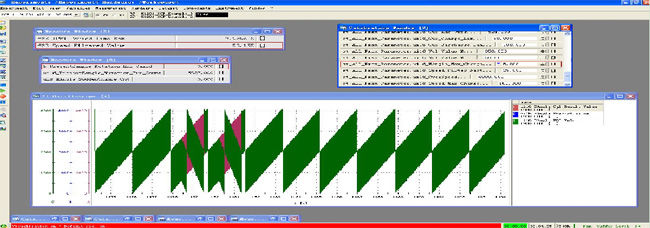
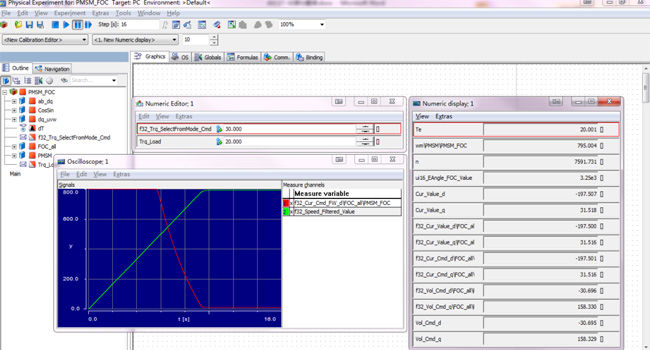
2:XCP标定和测量:电机控制器的开发调试与电机本体参数(比如电机电感与永磁体磁链)、硬件参数(比如电流传感器)、机械电参数(比如旋变零点)、MTPA与弱磁参数以及电流环PI参数等众多参数有关。为了调试的便捷,EMK控制器软件采用XCP On CAN/ETK的标定技术,基于INCA 7.x实现了测量和标定的功能,使得用户能够在PC界面上,对多达近千个电机控制参数进行标定,使之能适应大多数PMSM电机。同时通过XCP测量技术,能够在电机运行的同时即获取控制软件内部数据变量的数值,便于用户调试。基于INCA的XCP标定与测量工具界面如图3所示: