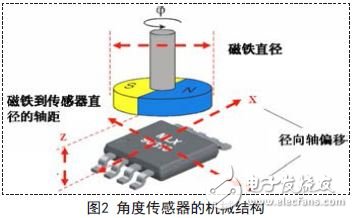
当小型磁铁(径向磁化)在芯片表面上方旋转时,MLX90316芯片内的集磁片(IMC)可以将平行作用于芯片表面的磁场集中起来,并在IMC结构的边缘产生正比于磁场的垂直分量,再通过两对位于 IMC下方的传统平面霍尔元件来检测此信号。这两对霍尔元件的放置方向相互垂直,并都平行于芯片表面(X轴和Y轴方向),通过这样的结构可以将实际角度编码为两个相位差为90°的正弦信号x V 和y V ,并正比于磁场强度。
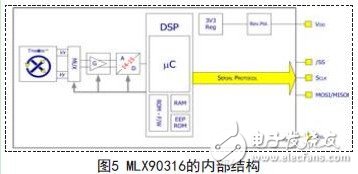
这两路霍尔信号将通过一个完全差分、带有经典偏移消除技术的模拟处理链进行放大、采样。调节后的模拟信号再通过ADC(可编程为14bits或15bits)转换为数字信号,之后这两个数字信号再通过芯片内部的由DSP实现的反正切函数计算模块来计算角度,计算公式为: