标题: 移动机器人路径规划算法研究及仿真平台的设计与实现 [打印本页]
作者: porereading 时间: 2015-1-11 20:40 标题: 移动机器人路径规划算法研究及仿真平台的设计与实现
一、项目介绍
1、项目来源:
当移动机器人处在一个简单或复杂、静态或动态、已知或未知的环境中时,机器人的首要任务是感知环境,避开障碍物,然后以最小或较小的消耗(时间、空间或者能量)完成自己的任务,这个过程的基础所在就是路径规划。所谓路径规划是指按照一定的性能指标,机器人如何从所处的环境中搜索到一条从初始位置开始的实现其自身目的最优或次优路径。路径规划是机器人研究中的重要领域,通常路径规划包括两个层面的意思:一个是关节机器人空间的路径规划;另外一个是移动机器人路径规划。前者具有较多的自由度,现在较多的应用于工业机器人中;而后者在近十年来的发展极为迅猛,其研究内容也更为广阔。我们选取后者作为研究内容。
实际上,移动机器人的路径规划方法是基于不同的环境和具体的移动机器人控制体系结构的,在差异较大的环境中对于性能不同的移动机器人来说,不同的路径规划方法各有自己的优势与劣势。目前还没有一种规划方法适合各种环境任何系统,并且有时候选择不同的规划方法结合双方的优点可以取得更好的规划效果。
二、项目计划实施内容
- 分析一般路径规划算法,了解设计需求;
- 对传统和智能机器人路径规划算法归纳整合,并给出相应的程序;
- 通过环境建模方法,提出机器人路径规划仿真系统平台设计方法,解决环境、机器人、障碍物、路径等采集与表示问题;
- 建立算法接口,用以将环境信息及路径规划算法进行输入输出;
- 实现机器人路径规划仿真平台的设计;
通过制作智能车(AGV)实物,通过导航线(特殊的路径规划),完成路径导航算法的测试。
三、预期成果及现阶段已取得的研究成果
1、预期研究成果:
- 对移动机器人路径规划算法进行研究和分析,为移动机器人系统开发提供基础;
- 改进或实现部分路径规划算法,并利用Matlab或MSRS等软件仿真;
- 设计并制作智能小车(AGV),设计导航线算法,进行实物验证,从而验证算法的可实现性;
- 建立环境模型、障碍物模型、机器人物理模型以及各种传感器模型,作为方针平台的底层框架;
- 开发出移动机器人路径规划仿真系统平台;
- 撰写总结报告一篇,力图发表两篇核心期刊论文;
2、现阶段已取得的研究成果:
成果一:机器人路径规划算法部分
在2011年12月—2011年3月期间,我们对不同的路径规划算法进行了研究,并且利用Matlab软件对其进行编程仿真,并且我们对仿真结果,进行了数据分析和研究,对不同的算法进行了对比,提出了各自的优缺点。
下面我们选取几种已经做好的算法进行成果展示,分别为A*算法、人工势场算法等。并且我们又进一步实现了避障及导航线循迹算法,为以后的研究工作奠定了基础。
附录为A*算法的流程,对于其他算法的模型及流程,详见各开发文档。
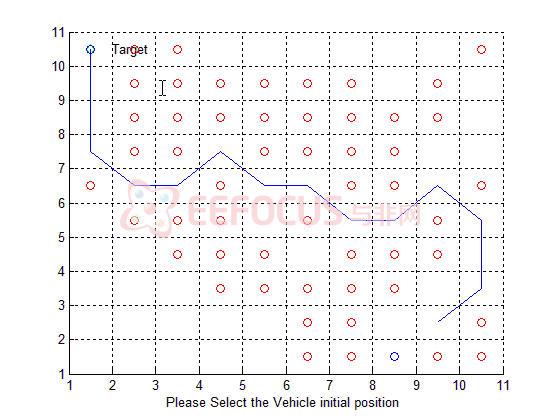
1、A*算法matlab仿真结果
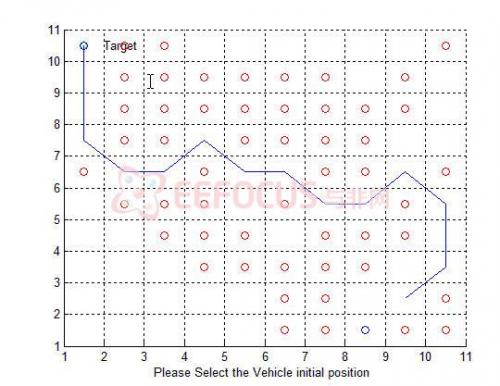
上图为采用A*算法的路径规划结果。图中红色圆点表示障碍物,蓝色圆点表示起始点。由图可以看出,A*算法的规划效果比较好。
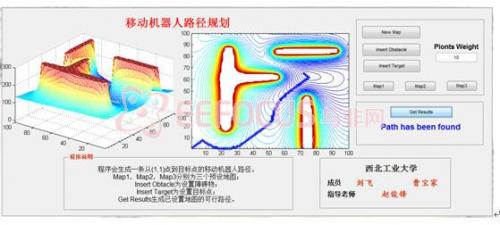
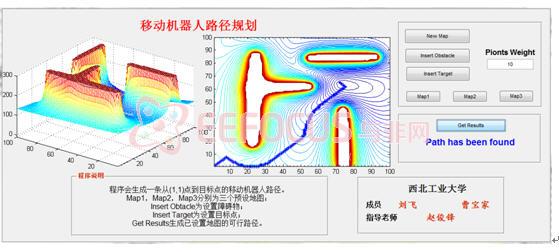
2、人工势场算法matlab仿真结果
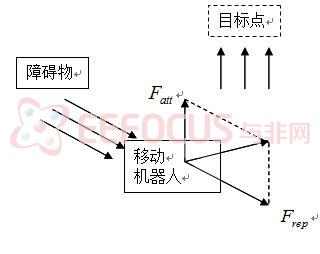
人工势场法的基本原理就是在机器人所处离散环境中的每一点 赋一个势场值
赋一个势场值 ,
, 的值是目标点的引力和障碍物的斥力的叠加。
的值是目标点的引力和障碍物的斥力的叠加。
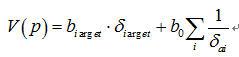
 和
和 是距离影响因子,
是距离影响因子, 为与目标的距离,
为与目标的距离, 为与障碍物的距离。因此机器人的路径规划就是从起始点沿着势场最快下降的方向达到目标点。
为与障碍物的距离。因此机器人的路径规划就是从起始点沿着势场最快下降的方向达到目标点。
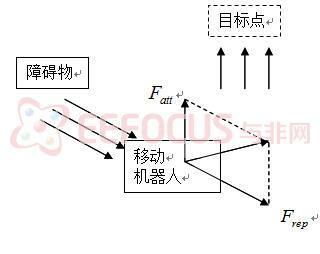
人工势场受力模型图
该方法的优点是在数学描述上简洁,可以使机器人迅速躲开突发障碍物,实时性好,因而经常被用于局部路径规划的设计。
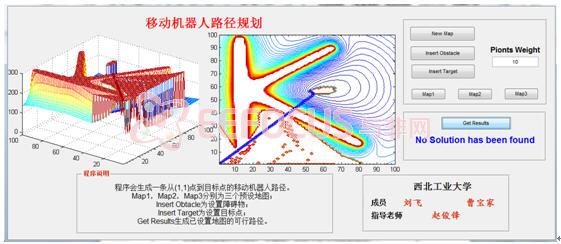
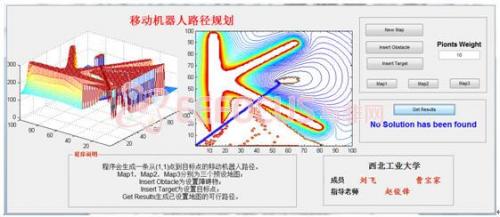
但是人工势场法的缺点也比较多:
如下图所示,会产生错误的结果:
| 欢迎光临 电子技术论坛_中国专业的电子工程师学习交流社区-中电网技术论坛 (http://bbs.eccn.com/) |
Powered by Discuz! 7.0.0 |
 赋一个势场值
赋一个势场值 ,
, 的值是目标点的引力和障碍物的斥力的叠加。
的值是目标点的引力和障碍物的斥力的叠加。
 和
和 是距离影响因子,
是距离影响因子, 为与目标的距离,
为与目标的距离, 为与障碍物的距离。因此机器人的路径规划就是从起始点沿着势场最快下降的方向达到目标点。
为与障碍物的距离。因此机器人的路径规划就是从起始点沿着势场最快下降的方向达到目标点。