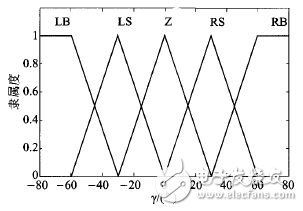
② 定义移动平台和目标点之间夹角为了,模糊子集定义为{LB,LS,Z,RS,RB},分别表示左大、左小、零、有小和右大。相应的角度隶属度函数如图8所示。
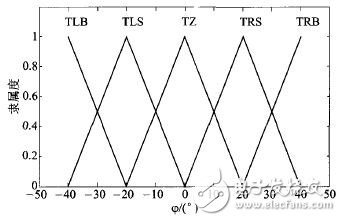
③ 移动平台的旋转角度φ的模糊子集定义为{TIB,TLS,TZ,TRS,TRB}。分别表示左转大、左转小、不旋转、右转小、右转大,相应的输出隶属度函数如图9所示。 3.2 建立模糊控制规则
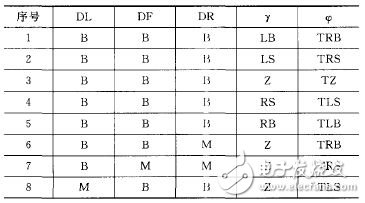
在移动机器人远离障碍物或不存在障碍物的情况下,依据移动平台的行驶轨迹,可以先对行驶方向进行调整。当检测到障碍物接近移动平台时,移动平台应改变行驶轨迹,避免发生碰撞。移动平台的部分模糊控制规则如表1所列。