标题:
六足仿生机器人原理解析及实物设计,包含软硬件设计
[打印本页]
作者:
porereading
时间:
2015-3-25 22:05
标题:
六足仿生机器人原理解析及实物设计,包含软硬件设计
一 研究目的
人类对于外太空探险的欲望从未间断过,因此,如何在不危害人类生命的前提下,挑选先遣部队之探险员,值得深思。近年来有相当多的探讨两足至多足机器人的在外太空的应用,过去两足机器人多为转型机械系统,其运动局限于二维平面,无法克服许多山区崎岖的地形。六足机器人具有跨障能力,可以克服崎岖的地形,且机器人比人类更能承受苛刻的工作环境,因此可以运用在许多危险的工作,例如火山的研究或其他星球的探测等。
在国外已由很多学者深入探讨过可移动式机器人的设计与改进。一般的移动式机器人的移动方式可分为轮形、足形。在足形移动式方面有分为两足、四足、六足和多足机器人,另外还有蛇形移动机器人。
无论在静止或行走,六足机器人的移动较具灵活性变化,但其步行控制需要有良好的控制与规划,六足机器人较不受地形限制,可四处移动是探索未知环境的一项利器,更是良好的研究题材。
二 系统总体方案
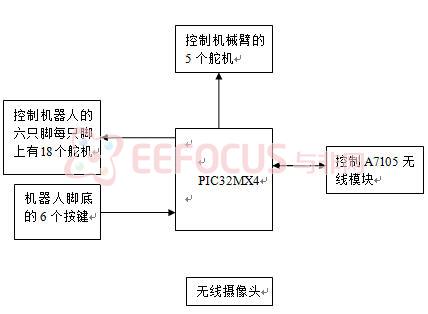
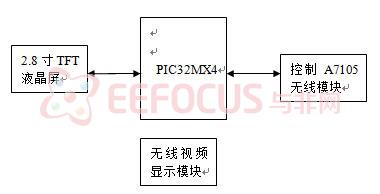
六足仿生机器人分为机器人模块和无线遥控模块两个大部分。他们的组成框图如下图所示。两个模块都是以PIC32单片机为控制核心,通过在2.8寸的TFT屏上模拟出按键控制机器人实现各种功能。
图1、六足机器人模块
图2、无线遥控模块
三 硬件设计
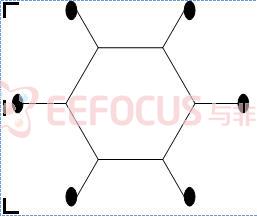
3.1 机器人的步态研究
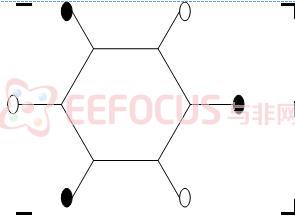
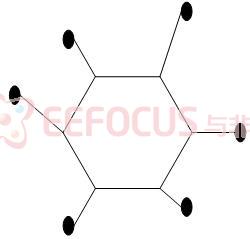
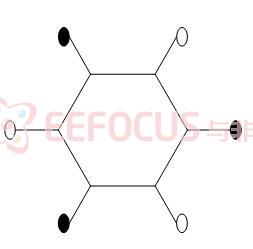
a.前进步态(黑椭圆代表该脚着底,空心椭圆代表没着地)
图3、 初始状态 图4、第一组的三只脚抬起来
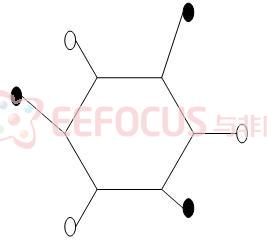
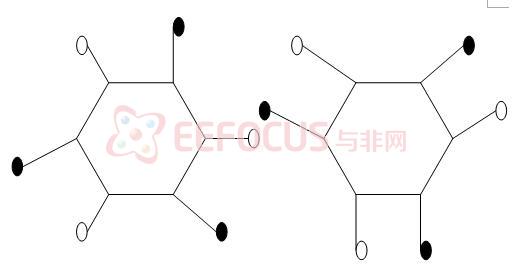
图5、第一组三只脚前移 图6、第二组三只脚抬起来
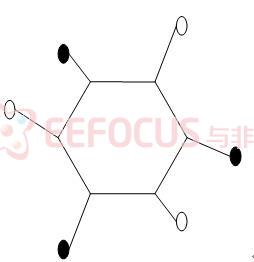
图7、第一组的三只脚利用对地 图8、第二组的三只脚着地
摩擦力将来身体前移,第二组的三只脚前移
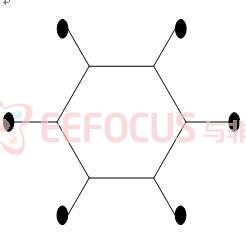
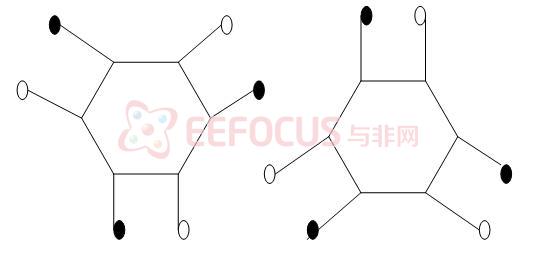
图9、第二组的三只脚利用对地摩擦力将身体前移,第一组的三只脚前移,然后从图4
开始重复执行,实现机器人的进退步态。
注意:为了让机器人能够直线运动,必须让每只脚的前进距离必须相同。
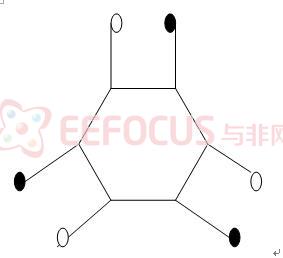
b.拐弯步态
图10、初始状态 图11、第一组的三只脚抬起来
图12、第一组的三只脚拐弯并踩到 图13、第一组的三只脚利用对地的摩擦
地面上,然后第二组的三只脚抬起来 力使机器人拐弯一定角度,第二组的三只脚拐一定角度
图14、第一组的三只脚抬起来, 图15、第二组的三只脚利用对地
第二组的三只脚着地 的摩擦力使机器人拐弯一定角度,第一组 的三 只脚拐一定角度
图16、第二组的三只脚抬起来,第一组的三
只脚着地,然后从图13开始重复执行
注意:该结构每次拐弯的最大角度为30度,拐弯的最小角度为1度。所以通过程序可以设置拐弯角度1到255度的任意拐弯。
欢迎光临 电子技术论坛_中国专业的电子工程师学习交流社区-中电网技术论坛 (http://bbs.eccn.com/)
Powered by Discuz! 7.0.0