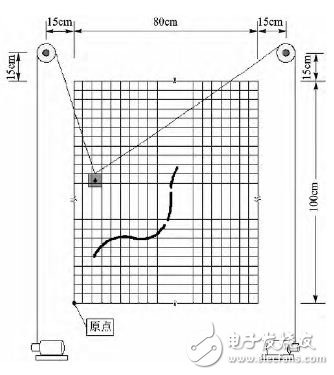
图1 悬挂系统的模型
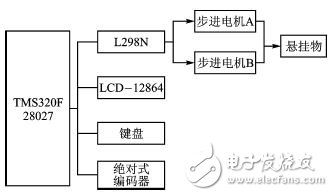
图2 悬挂系统控制框图
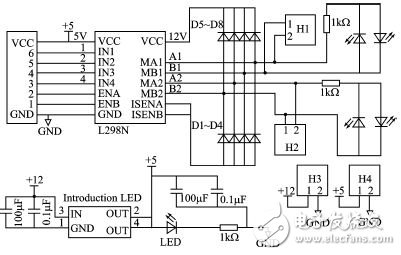
图3 L298N模块电路原理图
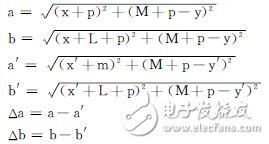
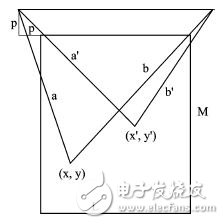
图4 坐标示意图
如图5所示,存在以下的角度和边长关系:

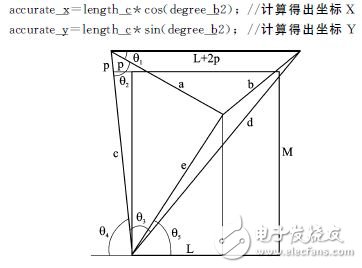
图5 坐标示意图
图6 步进电机闭环控制框图

图7 控制电机部分的程序流程图
![]()

图8 画圆取点示意图

表1 画图运动测试结果

表2 运动到指定点测试

| 欢迎光临 电子技术论坛_中国专业的电子工程师学习交流社区-中电网技术论坛 (http://bbs.eccn.com/) | Powered by Discuz! 7.0.0 |