标题:
指纹传感器工作原理及提高匹配性能的方法
[打印本页]
作者:
porereading
时间:
2015-9-15 20:55
标题:
指纹传感器工作原理及提高匹配性能的方法
指纹识别过程同所有的生物体特征识别的过程类似,分为用户注册和特征匹配2个部分。首先,需要录入指纹图像,对获取的原始图像进行处理,包括图像增强、分割、细化、二值化等。然后,对指纹的细节特征进行提取,比较常见的特征点有分叉点、端点,最后,生成模板储存在系统数据库中。无论是验证或者辨识的过程,都需要将待识别的用户的指纹图像再一次进行同样的图像分割、细化、二值化、特征提取等一系列步骤,生成和数据库模板同样的数据格式,最后,进行比对,得出识别的结果。
现有的指纹识别算法的前提条件是使用相同的指纹识别器上采集指纹或认证。所以,在网上的很多用户只能用同一类指纹识别器才能实现认证,实践证明:如果换作不同的指纹识别器,验证系统的性能将大大降低,这是因为指纹识别器没有标准的互换规定。
由于各种识别器的使用算法的不同,要使用指纹识别器的各系统需要个别的登录,而且,认证时必须使用与登录时使用的识别器类型相同。这说明个人和系统需要保留多个不同种类的识别器。解决不同识别器之问的通用算法就成为目前研究的一个很有意义的课题,这样,用户可以在自己的电脑上使用不同的识别器,方便了在线指纹验证系统的使用价值。
由于某类指纹传感器仅仅适合同种类型的采集仪验证使用,为了允许更多的用户使用和阻止假冒用户试图欺骗系统,多传感器指纹融合提高系统的性能显得很有必要。本文提出一种简单的融合策略研究了两类常用的指纹传感器一光学传感器和电容传感器。两类传感器分别采集两幅图像后通过预处理程序提取细节点后分别与模板指纹相匹配,得到2个匹配分数,然后,把这2个匹配分数通过融合规则得到最后的匹配分数,通过与单一传感器性能比较表明:融合后的结果对系统的性能有了很大的提高。
1提出的融合框架
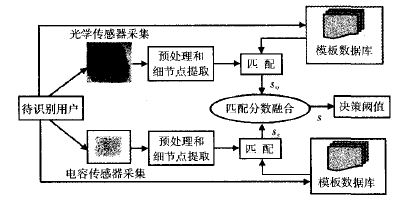
图1为提出的多传感器指纹验证系统框架图。首先,通过光学和电容传感器采集用户的指纹图像。然后,对图像进行预处理和分别提取两类传感器采集的指纹图像的特征,基于细节点的匹配算法被分别应用到光学和电容细节点集,因此,有2个匹配分数,并使用融合规则融合这些分数。
图1多指纹传感器验证系统框架图
1.1指纹传感器的类型和工作原理
由于当今指纹传感器规格很多,但是,至今仍然没有一个恰当和统一的协议和标准。目前,市场上现有的传感器主要有光学传感器和电容式传感器两类。
1.1.1光学传感器工作原理
它的基本原理如下:将手指按压在玻璃平面的一侧,在玻璃的另一侧安装有LED光源和CCD摄像头,LED发出的光束以一定的角度照射向玻璃,摄像头用于接收从玻璃表面反射回的光线。手指上的脊线与玻璃表面接触,谷线不与玻璃表面接触,因此,照射在指纹脊线所接触部分的玻璃表面的光线被漫反射,而照射在指纹谷线所对应的玻璃表面的光线被全反射,从而在由CCD摄像头捕获的图像中,对应指纹脊线的部分颜色较深,对应指纹谷线的部分颜色较浅。
1.1.2电容传感器工作原理
电容传感器原理根据按压到采集头上的手指的脊和谷在手指表皮和芯片之间产生不同的电容,芯片通过测量空间中的不同的电磁场得到完整的指纹。由这一构造原理,可以大大地提高指纹的防伪性。伪造的指纹一般用硅树脂或者白明胶等绝缘材料,在电容传感器上是无法成像的,这样使伪造的指纹无用武之地。但电容技术的芯片昂贵,且易受到干扰。
1.2指纹图像处理
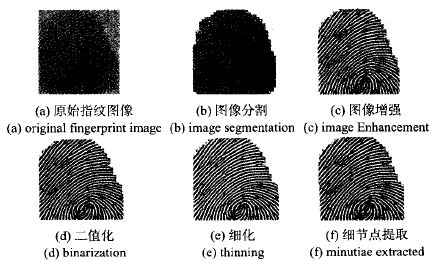
在该识别过程中,首先,通过指纹采集仪器采集到指纹J,由于采集指纹图像时图像质量不高或者在捺取指纹过程中因用力不均造成指纹畸变,常常会造成指纹图像分割的不准确,给后续的指纹识别带来更大的困难,造成指纹自动识别系统的拒识或误识,所以,指纹采集后的第一个关键技术就是对采集到的指纹图像进行预处理,包括对指纹图像的增强、二值化和细化等。预处理完成后即可进行特征提取,然后,进行特征匹配,输出匹配结果,如图2.
图2指纹图像预处理步骤
最后,细节点被提取出来,细节点定义为:端点和分又点(如图3),纹线端点是一条纹路的终结点,而纹线分叉点是一条纹路再次分开成为两条纹路的点。这2种特征点在指纹图像中出现的几率最大、最稳定,易于检测,而且,足以描述指纹的唯一性。
图3指纹细节点类型
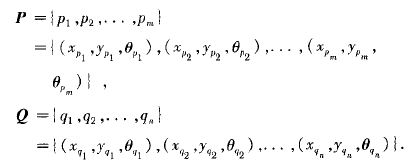
两幅指纹图像的匹配主要是解决旋转、平移和形变等问题。本文中,指纹匹配的输入是2个特征点的点集尸与Q,其中一个点集P是从输入的指纹图像中提取出来的,另一个点集合Q则是预先从标准的指纹图像中提取出来储存在模板库中。这2个点集合分别表示为
其中,记录了点集P中第i个特征点的3条信息:坐标、Y坐标与方向,则记录了点集Q中第j个特征点的3条信息:x坐标,y坐标与方向。假设两幅指纹图可以完全匹配起来,则可通过对输入的指纹图作某种变换(旋转、平移与伸缩)得到模板中的指纹图,因此,点集P可以通过旋转、平移与伸缩等变换近似成点集Q.
为了能够将输入指纹图像中的某一个特征点按照一定的变换方式转换成模板指纹图像中的相对应位置,需要知道相应的变换因子,△x与△y分别为x,y方向上的平移因子,△θ则是旋转因子。匹配基准点的确定是通过判断这2个三角形的相似程度得到的,在求取了两幅指纹图像之间的匹配基准点和变换因子后,本文对待识别指纹相对于模板指纹进行旋转、平移变换,以便判断两枚指纹是否来自于同一个手指。在本文中,求取变换后的待识别指纹的特征点坐标位置和所在区域的纹线方向。然后,将变换后的待识别指纹特征点集叠加到模板指纹特征点集上,检测2个特征点集合中相重合的特征点数目。由于本文中的匹配是一种非精确匹配,即使是一对匹配的特征点对,它们之问也不会完全重合,总是在位置、方向上存在有一定的偏差,所以,必须有一定的偏差容忍度。
为此,本文采用一种称为界定盒的方法。对模板指纹特征点集中的每一个特征点,选取它周围的一个矩形区域作为它的界定盒,只要变换后的待识别指纹中的特征点经过叠加后落在这个区域之内,而且,方向基本一致,可以认为这2个特征点对是一对匹配的特征点。
最后,算法统计所有相匹配的特征点数目,通过式(1)转换成匹配分数,其中,maxscore是通过叠加匹配的细节点个数得到的最大匹配得分,Temp—Num和Input—Num分别是模板和输入指纹的细节点数目
计算的匹配分数代表了相比较的两幅指纹的相似程度。参数值越大,相似性程度越高,而如果得分较小时,说明这一用户不一定是其宣称的用户,访问将被拒绝。
本文所使用的算法是一种典型的基于特征点坐标模型的点模式匹配算法。它对匹配过程中最难的一步一基准点的确定和变换参数的求取作了较深入的研究,根据3个近邻的特征点之间的相互关系来确定基准点、求取变换参数。该算法在一定程度上能够加快基准点的求取,从而提高整个匹配算法的速度。同时,该算法是根据多点来确定变换参数,而不是通常意义上的一点,在一定程度上可以消除在特征提取过程中所引入的位置、角度的偏差,得到更为准确的变换参数。
欢迎光临 电子技术论坛_中国专业的电子工程师学习交流社区-中电网技术论坛 (http://bbs.eccn.com/)
Powered by Discuz! 7.0.0