
图13 地球磁场空间旋转后在传感器空间坐标内得到球体
这种情况下,可以通过足够的样本点求出圆心O(γx, γy, γz), 即固定磁场干扰矢量的大小及方向。公式如下:
图14 设备的空中8字校准示意图
1 | 2 | 3 | 4 | 5 |
Face me Heading up | Face down Heading front | Face me Head down | Face me Heading Left | Face me Heading up |
6 | 7 | 8 | 9 | 10 |
Face up Heading front | Face Front Heading down | Face front Heading right | Face front Heading up | Face down Head front |
图15 10面交准法步骤

图16 10面校准后的空间轨迹
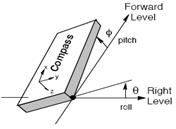 | 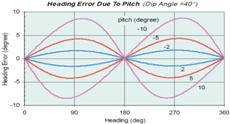 |
图17 Pitch角和Roll角定义 | 图18 Pitch角引起的航向角误差 |
图19 手机在空中的倾斜姿态
 |  |
 式3
式3
| 欢迎光临 电子技术论坛_中国专业的电子工程师学习交流社区-中电网技术论坛 (http://bbs.eccn.com/) | Powered by Discuz! 7.0.0 |









