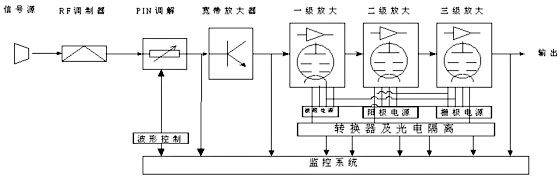
 图1 发射机系统原理图
图1 发射机系统原理图 图2 监控系统流程图
图2 监控系统流程图 图3 通道选择算法流程图
图3 通道选择算法流程图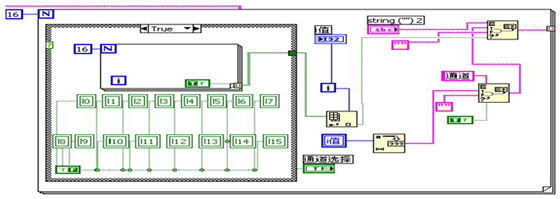 图4 通道选择算法在Labview中的实现
图4 通道选择算法在Labview中的实现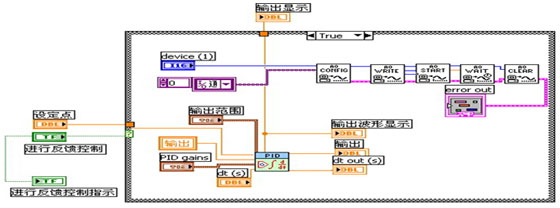 图5 PID输出在Labview中的实现方式
图5 PID输出在Labview中的实现方式 其中Y(t)是输出信号,e(t)为输入偏差,Kp为放大倍数,Ti为积分时间常数,Td为微分时间常数。PID控制器在计算机上实现,采用增量算法,如下
其中Y(t)是输出信号,e(t)为输入偏差,Kp为放大倍数,Ti为积分时间常数,Td为微分时间常数。PID控制器在计算机上实现,采用增量算法,如下 图6 HT-7发射机监控系统界面截图
图6 HT-7发射机监控系统界面截图| 欢迎光临 电子技术论坛_中国专业的电子工程师学习交流社区-中电网技术论坛 (http://bbs.eccn.com/) | Powered by Discuz! 7.0.0 |