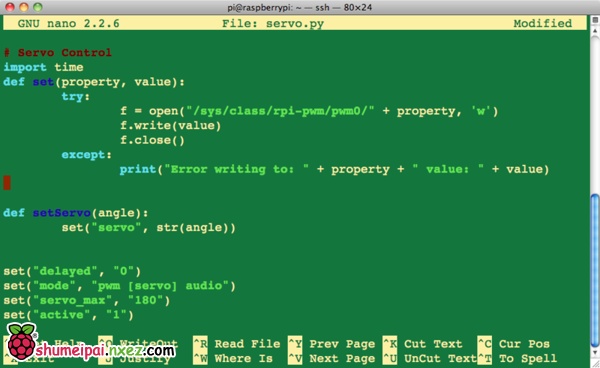
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 | # Servo Control import time def set(property, value): try: f = open("/sys/class/rpi-pwm/pwm0/" + property, 'w') f.write(value) f.close() except: print("Error writing to: " + property + " value: " + value) def setServo(angle): set("servo", str(angle)) set("delayed", "0") set("mode", "servo") set("servo_max", "180") set("active", "1") delay_period = 0.01 while True: for angle in range(0, 180): setServo(angle) time.sleep(delay_period) for angle in range(0, 180): setServo(180 - angle) time.sleep(delay_period) |
| 1 | nano servo.py |
| 1 | python servo.py |
| 欢迎光临 电子技术论坛_中国专业的电子工程师学习交流社区-中电网技术论坛 (http://bbs.eccn.com/) | Powered by Discuz! 7.0.0 |