|

- UID
- 871057
- 性别
- 男
|

摘要:论述了一套用于汽车电器系统振动可靠性试验实时监控的电路多参数测试系统。该系统以LXI 总线模块化虚拟仪器为核心,以LabWindows/CVI 为软件开发平台,有效的结合计算机故障诊断技术,形成了一套可以独立完成远程控制、测试、数据处理和实时故障诊断的试验监控系统,为汽车电器产品试验过程的智能化、可溯性奠定了基础。
1 引言
由于路面激励和发动机振动这两大激励源的存在,汽车电器与电子系统故障占整车故障的比例极高,且呈逐年增加的趋势。在试验室内对车辆及其零部件进行道路模拟振动试验被认为是加速产品开发、提高产品质量的有效手段。传统的试验过程多采用人工值守,对相关数据进行纪录。这种方式存在以下问题:
1. 试验环境恶劣,常伴有噪声、湿热等因素;
2. 时间长,值守人员的工作负荷大;
3. 人工记录数据,缺乏完整性和一致性;
4. 故障现象不具有可溯性,无法为故障分析提供充分的依据;
这些不足之处在很大程度上影响了试验的有效性,无法对试验结果进行深入的分析。由于汽车电器系统自身控制原理复杂,包含的元器件数量种类繁多,结构形式多样,借助自动化测试设备对整车电器系统进行试验过程的实时监控尚不具备通行的有效方法。本文着重论述了一种应用于“汽车电器系统可靠性试验台”的适用于整车电器系统试验监控及故障诊断的测试系统的构建方法。
2 监控系统工作原理
汽车电器可靠性试验台借助辅助试验设备施加电应力和振动应力,使台架上的汽车电器系统模拟汽车道路试验的实际工况进行试验。“汽车电器系统可靠性试验实时监控系统”以电路内的可及节点作为监控点,借助数据采集设备对各用电器回路内电压、电流、频率等信号进行跟踪测量和记录;通过应用软件对单元数据进行实时的处理分析,及时发现故障,实现声光电报警,并对典型故障的类型和位置做出诊断。
2.1 系统基本设计构想
由于被试系统自身的复杂性,监控系统在设计上采用了基于“UUT(Unit Under TEST)分类”的系统规划方式,如图1 所示。针对UUT 类型展开系统的硬件和软件设计。采用这种方法的原因在于:
1. 汽车电器系统的常规用电设备采用的是并联方式,以每一用电器回路作为一个试验单元UUT,则整个被试系统即可作为一个由多个UUT 并行试验的电路网络系统;
2. 汽车某些电器设备在其工作模式及故障形式上多具有共性,结合其自身特性及相关标准要求可将全部UUT 单元划分为灯具、电机、仪表等几种典型分类;
3. 针对UUT 分类展开设计而非针对单个UUT,可以减小系统复杂度,提高通用性。
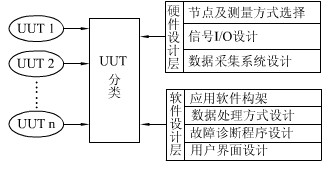
图1:系统基本设计构想
2.2 参数测量的实现
在进行可靠性试验时,要对被试系统各用电器进行全面的监控和准确的故障诊断,其前是:第一,能够从系统中获得足够多的可及测试节点但不能破坏被试系统完好性;第二,信号I/O 接口必须连接可靠,能够耐受高强度试验应力而不先于被试系统发生故障。按UUT 类型确定待测信号和采样节点,并以汽车电器实际使用的连接器作为信号输出接口,设计采样连接器接入电路可获取监控所需的信号。图2 说明了某一阻性电器单元的采样方法。原状态下汽车用电器单元Rx 直接与汽车电线束连接形成工作回路,其正负极回路电阻分别为r1、r2,阻值未知;试验时将包含图示电路的“采样连接器”接入,便可在不影响原电路工作的情况下获得电路状态参数。
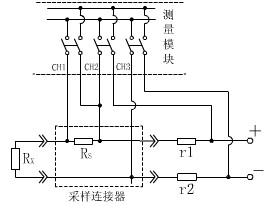
图2:阻性电器单元监控原理
构建多通道数据采集系统,对各节点处的电参数进行实时的测量和数据处理,便可实现准确的故障识别和定位。
3 系统测试仪器的合成
系统采用基于LXI (LAN eXtensions for Instrumentation)总线的测量平台。LXI 是一种适用于自动测试系统的新一代基于LAN 的模块化平台标准。LXI 模块化测试标准融合了GPIB仪器的高性能、VXI/PXI 卡式仪器的小体积以及LAN 的高速吞吐率,并考虑了定时、触发、冷却、电磁兼容等仪器要求。同时还具有诸多优势特性,例如:它是开放的工业化标准体系,具有向下兼容性,仪器开发成本低,有很好的协同工作能力,具有可扩展性等。其数据传输摆脱了传统仪器对数据传输距离和带宽的限制,可以方便的实现仪器远程控制和远距离高带宽的数据传输。在恶劣的试验环境,如振动试验的高噪声环境条件下,因其在远程控制和数据传输网络上的优势,LXI 相对于其他总线平台具有更好的适用性。
3. 1 主控制器
如图3 所示,系统以工控机作为主控制器,通过LAN 网络进行模块控制,并完成系统的数据处理、显示、存储等工作。作为整个试验系统的主控制器,工控机同时担负着可靠性试验应力加载控制的任务。
3.2 LXI 虚拟仪器模块
1)测试主机系统选用AGILENT 34980A 开关/测量单元作为硬件平台,通过内置数字多用表对待侧信号进行测量转换和输出。测试主机通过LAN 总线与主控计算机进行通讯和数据交换。
2)多路转换器由于待测系统内的信号以较为稳定的直流模拟量信号为主,所以采用公共DMM 分时测量方式。通过两个光电隔离ETF 开关模块,实现80 个通道的双线测量。
3)抖动测量模块用于瞬断监控,检测电路内电压瞬态跳变情况。
4)D/A 转换模块D/A 转换器为被试系统工作器件提供驱动信号,如转速表和车速表工作所需的电压脉冲信号,燃油表、水温表工作所需的电流信号。信号由主控计算机控制,由D/A 转换器输出,经过调理后通过模拟量I/O 接口输入被试系统。
5)数字示波器数字示波器通过LAN 总线与主控计算机进行通讯和数据交换,并通过模拟总线连接测试主机,与内置仪表共用开关模块。实现对80 个测量通道的任意一路信号进行高频采样和虚拟示波。
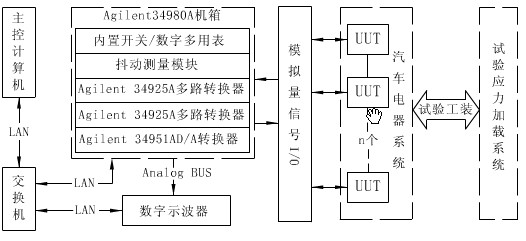
图3:系统硬件构成
3.3 关键问题
1) 频率信号的测量待测信号同时存在100Hz 以上和3Hz 以下的频率信号,由于系统是公共DMM 等时扫描测量的方式,两种信号需采用不同的采样方式进行测量。对于高频信号将系统扫描通道设置为频率测量直接输出。对于低于3Hz 低频信号,由于其频率过低频率通道无法直接测量,因此需采用拟合的方式。此种方式对系统扫描频率有较高要求根据
Nyquist 定理:

单通道采样率应由待测信号频率上限决定;
故有:

若对80 个模拟通道进行扫描采样,开关的总切换频率应大于480CH/s。系统将单次扫描的时钟设计值为160ms,实际扫描频率为500CH/s,实现了低频信号的测量。
2)瞬断监控的实现瞬断作为一种电路瞬态现象,DMM 分时采样方法采样率过低,无法对该类信号实现监控,而多通道并行的模拟量数据采*导致大量的数据冗余和过高的系统成本。系统使用了抖动测量模块以32 通道并行的数字量采样方式实时监测各通道电压跳变情况,单通道最高采样率为0.1μs,根据汽车电器的试验电压将监控电压阈值设定为10.5V/21V 可选。
4 系统应用软件设计
4.1 软件开发环境
系统选用LabWindows/CVI 作为软件开发平台。它具有交互式编程方法和丰富的库函数,为开发人员建立数据采集和过程监控系统提供了理想的软件开发环境,是实现虚拟仪器及网络化仪器的快速途径。
4.2 试验监控中的多线程技术
Windows 是弱实时性的操作系统.它通过线程的优先级来实现抢先,通过对测试线程进行适当的优先级设置来满足大部分测试任务的实时性要求。试验监控要求系统控制、数据采集、数据显示和数据分析各项功能同步完成。利用LabWindows/CVI 多线程中的线程池技术可以很好的实现系统的实时性。以界面控制作为主线程,通过界面操作向其它线程发出控制指令,使系统能够对用户操作及时响应;数据采集、实时显示、故障诊断作为辅助线程,与主线程同步执行。在辅助线程中,实时显示线程和数据分析线程通过管道消息驱动机制与数据采集线程进行实时的通信,实现线程间的数据共享。
4.3 故障诊断方法
按照逻辑识别原理:故障原因函数A 、故障特征函数X 和决策规则E 三者满足布尔函数关系,故障诊断过程的实质就是从已知的X 、E 中解出A ,用逻辑语言表示为:其实现方法是将被试系统按UUT 工作特性划分为6 种典型的监控单元类型,并针对类型设计相应的故障识别子程序,其内容包括:
1. 以监控单元类型为对象建立典型故障模式数据库,即构建故障原因函数A;
2. 用电路的可测物理量I、U、f 等参数对故障模式进行描述,构建故障特征函数X ;
3. 以逻辑判断为基础建立故障决策规则E ,并转化为相应的故障识别子程序。

图4:故障诊断简化流程图
运行过程中,系统发出采集指令并取回数据,数据处理线程首先将各待测物理量实时数据与阈值库中UUT 状态参数对应的阈值进行对比,当发现有超阈值数据便认为有故障发生,开始起动该UUT 所属类型对应的故障识别子程序进行故障诊断,诊断子程序执行结束后实现诊断结果输出并作记录。图4 说明了系统的故障诊断过程。
4.4 系统数据管理及数据库
系统以Microsoft SQL Server 为底层建立数据库,通过SQL Toolkit 建立ODBC 数据源,对数据库进行连接和数据信息存取的操作。系统配置数据可由开放的用户界面生成,使用户可以针对不同的试验对象对系统进行相应配置,从而确保了系统的灵活性和通用性
|
|


