现代检测技术和自动控制理论的飞速发展,能够使得人们设计高精度的控制系统,基于自由摆的平板控制系统就是这些技术和理论的应用实例之一。
本文所讨论的自由摆平板控制系统如图1所示,该系统可以实现如下功能:(1)控制电机使平板随着摆杆的摆动(3~5周)而旋转,摆杆摆一个周期,平板旋转一周(360°),偏差绝对值小于45°。(2)在平板上粘贴一张打印纸,在平板中心稳定叠放8枚1元硬币,用手推动摆杆至一个角度θ(θ在45°~60°间),调整平板角度,启动后放开摆杆让其自由摆动。在摆杆摆动过程中,硬币在摆杆的5个摆动周期中不从平板上滑落,并保持叠放状态。(3)在平板上固定一激光笔,光斑照射在距摆杆150cm距离处垂直放置的靶子上。摆杆垂直静止且平板处于水平时,调节靶子高度,使光斑照射在靶纸的某一条线上,标识此线为中心线。用手推动摆杆至一个角度θ(θ在30°~60°间),启动后,系统应在15s内控制平板尽量使激光笔照射在中心线上(偏差绝对值<1cm),完成时以LED指示。
1 系统方案选择与论证
1.1 电机模块的选择与论证
电机是整个系统用于控制的不可缺少部分。电机的选择不但要有快速的反应还要有准确的转动角度以配合整个系统的运行。
方案一:采用普通直流电机。直流电机具有良好的调速特性,调速平滑、方便,调整范围广;过载能力强,能承受频繁的冲击负载,可实现频繁的无级快速启动、制动和反转;能满足生产过程自动化系统各种不同的特殊运行要求。
方案二:采用步进电机。步进电机的显著特点就是能快速启动和停止,而且在程序上控制相对容易,如果负荷不超过步进电机所能提供的动态转矩值,就能使步进电机启动和反转。另一个显著特点就是转换精度高,正转反转控制灵活。
方案三:采用金属齿轮微型舵机,舵机具有体积小、输出力矩大、控制简单等优势,但不能简单完成转动360°的要求。
综合以上,选择方案二。
1.2 控制器系统的选择与论证
控制器系统是整个系统的核心,控制着数据的采集和发送,控制器的性能好坏决定了整个系统的准确性。控制器要求运算速度较快,数据传输接口丰富易用。
方案一:采用STC12C5A16S2作为控制核心。51单片机价格低廉、使用简单、软件编程自由度大,可用编程实现各种控制算法和逻辑控制,但其运算速度较低,增大了硬件电路设计与控制过程的复杂度。
方案二:采用FPGA作为系统的控制器。FPGA可以实现各种复杂的逻辑功能,规模大、密度高。但由于本设计对数据处理速度要求不高,FPGA的高速处理的优势得不到充分体现,并且由于其集成度高,使其成本偏高,同时其芯片引脚较多,实物硬件电路板布线复杂,加重了电路设计和实际焊接的工作。
综合以上,选择方案一。
1.3 传感器的选择与论证
传感器能进行平板的角度检测,是一种被测量参数能按一定规律转换成可用输出信号的器件或装置。传感器是与被测对象直接有关联的部分,其性能的优劣直接影响着检测系统的精度,所以传感器的正确选择十分关键。
方案一:采用无触点磁敏电位器,利用磁敏元件非接触地感应磁场强度的变化,实现对角度的测量。但缺点是其频响特性差、截止频率低、精度低,不适用于机械安装,电机的振动也影响其准确性。
方案二:采用加速度计,通过加速度计的旋转,输出值g,与平衡位置比较,可换算成水平倾角,读取数据简便,传感器体积较小,也易于安装在系统上进行测量。
综合以上,选择方案二。
2 系统设计
2.1 系统总体设计
系统的总体设计框图如图2所示,此系统是一个自动平衡测试系统,它由自由摆系统、检测系统和控制驱动系统三大部分构成。
 2.2 系统的工作流程 2.2 系统的工作流程
系统硬件设计平板转动后,通过传感器形成的加速度值经过A/D转换,作为单片机的输入数据,原理图如图3所示。单片机STC12C5A16 S2利用其I/O口,输出信号来驱动DDS模块,产生频率精确、宽度可调的脉冲信号。该脉冲信号可使高细分两相混合式步进电机驱动芯片THB6128驱动42BYGH4417完成步进运行,原理图如图4所示。从而实现对电机转速、转向、启停等多种工作状态的快速准确控制,最终使平板达到自由摆系统中的规定位置。我们利用按键来选择不同的工作模式,利用LCD显示角度传感器的数值,各个功能完成时利用LED指示结束。

2.2 平板随着摆杆的摆动而旋转
单片机STC12C5A16S2采用内部定时器方式2工作,获得不同周期的时钟,T=(2s-N)/SYCLK。
自由摆周期摆动时,平板需在单个周期内完成360°旋转。由自由摆摆动周期 可知,摆长L=1m,当地重力加速度g=9.76m/s,则摆动周期T=2.011s。 可知,摆长L=1m,当地重力加速度g=9.76m/s,则摆动周期T=2.011s。
两相四线混合式步进电机42BYGH4417利用芯片THB6128对其步距角进行细分。步距角为1.8°,细分数为A,则步进电机转动角度a°时,PWM脉冲个数N=a*A/1.8。步进电机脉冲数为N时,脉冲频率f与转动时间T间的关系为N=f*T。
综上所述,若细分数A=128,则DDS模块需要产生频率f=12.73kHz的脉冲信号,通过单片机内部定时器编程即可实现。考虑到外界压力、空气阻力等状况,可多次试验调试,适当增加频率f即可实现单摆一个周期摆动时,平板旋转一周。
2.4 硬币的稳定控制
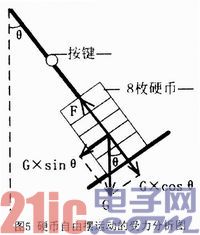
我们在平板上叠放8个一元的硬币,当单摆从角度θ开始摆动时,控制平板由水平快速同步到图5所示位置,则硬币整体受到一个竖直向下的重力和始终沿杆方向变化的支持力,将这些力沿垂直和平行于速度方向进行分解。其中,垂直于速度方向上的力使硬币的速度方向发生改变,充当硬币绕悬点做变速圆周运动的向心力。平行于速度方向上的力使硬币的速度大小发生改变,充当摆球的回复力。在此种情况下即可保证硬币随摆杆摆动而不滑落。为了达到放手后平板快速同步,我们将开启开关安装在摆杆上,放手即开启。
2.5 激光笔的定位
开启系统,让平板上的激光笔初始化到指定中心线位置。当摆杆被推到角度θ时,角度传感器将偏离角度读入到单片机,要完成快速定位,激光笔需旋转角度γ,如图6所示。

经计算可知,当摆杆处于近离中心线位置(左图)时, ;当摆杆处于远离中心线位置(右图)时, ;当摆杆处于远离中心线位置(右图)时, 。 。
设定t秒完成定位,则利用平板随摆杆的摆动而旋转中所示方法,可得PWM脉冲个数,从而得到DDS模块需要产生的脉冲频率,通过单片机内部定时器方式2工作,完成DDS的输出。2.6 程序的设计流程图
主程序流程图、步进电机控制程序流程图、自动旋转程序流程图和平衡控制程序流程图依次如图7所示。


3 结论
本文介绍了一种基于自由摆的平板控制系统,完成了步进电机对平板的控制,完成了平板随着摆杆的摆动而旋转,8枚硬币随摆杆摆动不滑落,激光笔在15s内定位中心线的功能。经实验测试,效果均达到了设计要求。 | 



