|
 
- UID
- 864567
|

摘要:针对传统类人机器人在控制系统实时性和视觉识别方面的不足,以S3C6410作为主控芯片,设计了具有视觉识别功能的类人机器人控制系统,通过改进和简化视频识别算法取得了良好的目标识别效果。实验表明,基于本控制系统设计而成的类人机器人实时性好,目标识别准确,通过调整运动路径能够快速找到目标。
关键词:类人机器人;嵌入式实时操作系统;机器视觉;颜色识别
引言
智能移动机器人是近年来发展起来的一门综合学科,涉及机械设计、传感检测、人工智能等多方面知识。类人机器人的控制系统分为三个层次:最上层是机器人的策略规划层,利用各种算法实现各部分的功能;中间一层运行各类应用程序的嵌入式实时操作系统;最底层是硬件平台,通过外围接口获得各类数据、信息。
自主机器人利用传感器获取的信息控制机器人的动作。本文根据武术擂台机器人的实际需要,设计了机器人的控制系统,实现摄像头图像采集、处理和舵机控制等功能。
策略规划层中,由于图像信息具有信息丰富、对场景描述完全的特点,主要通过处理摄像头采集的图像信息实现颜色目标定位。这里采用Linux嵌入式操作系统,由于嵌入式系统资源的限制,要求目标识别算法运行效率高,占用内存空间小。硬件平台主要是控制舵机实现机器人的运动控制。
1 系统控制电路与视频识别算法
1.1 机器人整体架构
在武术擂台技术挑战赛中,机器人要采集目标的位置信息。由于I/O、A/D转换的有效检测距离有限,机器人采用摄像头采集场地上的图像信息,根据目标的颜色进行识别、定位。当检测到目标位置以后控制舵机自主运动向目标靠拢,完成自我介绍、抱绣球等动作。所设计的机器人外形如图1所示。
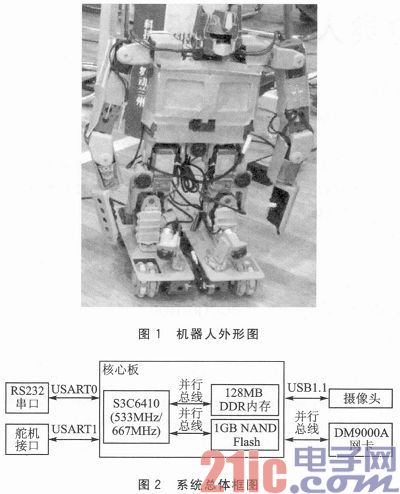
从图中可以看出,机器人头部采用摄像头,通过USB接口与主控板进行连接,用于采集图像信息。机器人腰部、腿部、胳膊各关节利用舵机使其具有一定的自由度,用到的舵机为CDS系列数字舵机。它内部有ATmega8芯片,主控板通过串口与ATmega8通信,就可以实现舵机的控制。针对以上要求,同时考虑系统的实时性,采用S3C6410作为主控芯片。实际控制系统总体框图如图2所示。
1.2 舵机控制系统设计
主控板通过串口1完成与舵机之间的数据通信,舵机控制电路的原理图如图3所示。
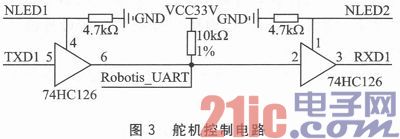
由于半双工数据线只有一根,所以必须在电路上实现发送和接收上的分离。这里网络Robotis_UART一端直接接到舵机的信号线上,而另一端经过74HC126的两个缓冲器分别与主控芯片的TXD1和RXD1相连,再通过主控芯片使能的方式来确定是发送还是接收数据。主控芯片可以使NLED1为高而NLED2为低,这时TXD1就取得了线路的控制权,主控芯片就可以发送数据到舵机了。反之,当NLED2为高而NLED1为低时,这时RX D1就取得了线路的控制权,这时舵机可以返回数据。 |
|


