首页
|
新闻
|
新品
|
文库
|
方案
|
视频
|
下载
|
商城
|
开发板
|
数据中心
|
座谈新版
|
培训
|
工具
|
博客
|
论坛
|
百科
|
GEC
|
活动
|
主题月
|
电子展
注册
登录
论坛
博客
搜索
帮助
导航
默认风格
uchome
discuz6
GreenM
»
工业控制
» 具有颜色识别功能的类人机器人设计2
返回列表
回复
发帖
发新话题
发布投票
发布悬赏
发布辩论
发布活动
发布视频
发布商品
具有颜色识别功能的类人机器人设计2
发短消息
加为好友
rise_ming
当前离线
UID
864567
帖子
4448
精华
0
积分
2224
阅读权限
70
在线时间
123 小时
注册时间
2011-12-12
最后登录
2014-8-25
金牌会员
UID
864567
1
#
打印
字体大小:
t
T
rise_ming
发表于 2013-8-1 22:14
|
只看该作者
具有颜色识别功能的类人机器人设计2
机器人
,
摄像头
,
波特率
,
结构体
,
软件
舵机控制的软件方面,需要完成串口的相关配置,主要包括波特率、起始位数、数据位数、停止位数和流控制模式。这里将其配置为波特率19 200、起始位1位、数据位8位、停止位1位和无流控制模式。串口的设置主要是设置struct termios结构体的各成员值,如下所示:
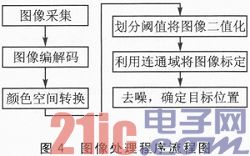
2 图像识别算法
摄像头采集到的图像主要作如下处理:首先对数据解码,利用查表法将RGB空间模型数据转化为HSI空间模型,然后采用类间方差法将图像进行二值化,再利用连通域对目标进行标定,最后对图像进行去噪,从而实现目标的识别和定位。图像处理程序流程图如图4所示。
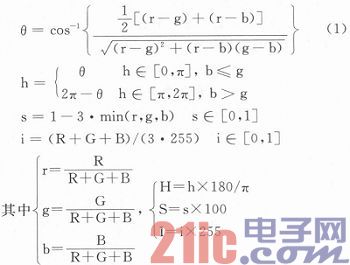
摄像头采集的图像为RGB格式,但RGB模型中R、G、B值易受光线影响,不适宜进行颜色识别;HSI模型中,不同的颜色对应不同的色调参数H,并且H受外界光照影响小,因此采用HSI模型实现颜色识别。因此,要通过某种算法,先将RGB色域空间映射到HSI空间。常用的颜色空间转换算法如下:
实现颜色空间转换以后就要根据不同的H值对图像进行二值化处理。二值化的实质是一分类问题,即把一幅图像所含有的0~255的二进制像素按照某个阈值划分成两类。如果阈值设得太低,结果会引入过多的背景信息,但太高就会导致目标信息的丢失。类间方差法(Otsu)、最大熵方法(KSW)和直方图平衡法(Balanced Histogram Thresholding,BHT)是目前应用较广的自动阈值计算方法。
这里采用类间方差法,它的核心思路就是通过最大化类间方差来寻找最佳阈值。假设某一阈值T将整个二值图像分为C0(1,…,T)和C1(T,…,255)两类,则两类的出现概率可以用下式计算:
收藏
分享
评分
回复
引用
订阅
TOP
返回列表
嵌入式技术
PowerPC
模拟电路
MCU 单片机技术
X86
FPGA/CPLD可编程逻辑
电商论坛
Pine A64
资料下载
方案分享
FAQ
行业应用
消费电子
便携式设备
医疗电子
汽车电子
工业控制
热门技术
智能可穿戴
3D打印
智能家居
综合设计
示波器技术
存储器
电子制造
计算机和外设
软件开发
分立器件
传感器技术
无源元件
资料共享
PCB综合技术
综合技术交流
EDA
MCU 单片机技术
ST MCU
Freescale MCU
NXP MCU
新唐 MCU
MIPS
X86
ARM
PowerPC
DSP技术
嵌入式技术
FPGA/CPLD可编程逻辑
模拟电路
数字电路
富士通半导体FRAM 铁电存储器“免费样片”使用心得
电源与功率管理
LED技术
测试测量
通信技术
3G
无线技术
微波在线
综合交流区
职场驿站
活动专区
在线座谈交流区
紧缺人才培训课程交流区
意见和建议