图6:Zynq-7000 All Programmable SoC由嵌入式双核Cortex A9处理器子系统(灰色)和可编程FPGA逻辑(黄色)组成,为马达控制提供一款终极平台,可在软/硬件模块间实现无缝互操作性。
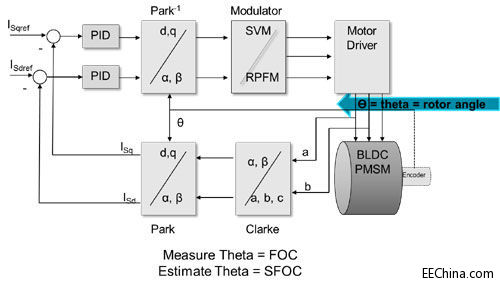
Zynq-7000 AP SoC经过精心设计,在单个芯片上即可提供一款最佳的马达控制平台。Cortex A9处理器可用于运行网络软件协议栈、操作系统以及用户的应用代码。它们均以软件方式运行,可实现对器件的总体应用管理。对于FOC算法、调制实现方案和供工业网络使用的定制MAC等关键性功能模块,最好在FPGA架构中实现,以便发挥硬件加速和高速计算优势。由于嵌入式处理器和FPGA架构集成在单个器件中,可以灵活选用软/硬件架构。






 2013-11-1 11:26:45 上传
2013-11-1 11:26:45 上传 2013-11-1 11:26:45 上传
2013-11-1 11:26:45 上传 2013-11-1 11:26:45 上传
2013-11-1 11:26:45 上传 2013-11-1 11:26:46 上传
2013-11-1 11:26:46 上传 2013-11-1 11:26:46 上传
2013-11-1 11:26:46 上传 2013-11-1 11:26:46 上传
2013-11-1 11:26:46 上传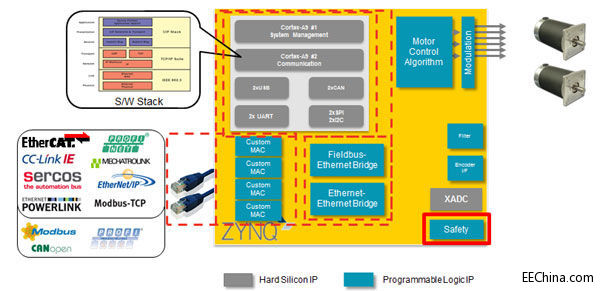 2013-11-1 11:26:46 上传
2013-11-1 11:26:46 上传