|

- UID
- 1023166
- 性别
- 男
- 来自
- 燕山大学
|

导读] 教科书中介绍稳压电源时,几乎毫无例外都介绍各种类型的直流稳压电源,交流电压变换广泛采用变压器,交流电压的稳定主要依赖于电网电压的稳定。需要交流调压时常采用可控硅斩
关键词:微处理器PWM稳压电源
1 问题的提出与现状分析
教科书中介绍稳压电源时,几乎毫无例外都介绍各种类型的直流稳压电源,交流电压变换广泛采用变压器,交流电压的稳定主要依赖于电网电压的稳定。需要交流调压时常采用可控硅斩波,利用导通角的变化实现交流调压,这种调压的缺点是输出电压波形严重畸变,对电网存在较为严重的谐波污染。可控硅调压波形如图1所示。
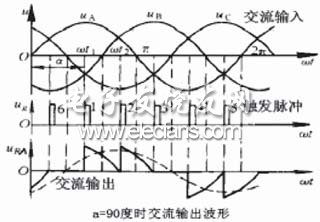
图1 可控硅调压输出波形
随着计算机应用技术的普及与发展,尤其是在物联网的建设中,作为计算机的感官——传感器广泛应用于各种参数的检测中,例如交流电桥检测电路,如电容式压力传感器、电感式物位传感器等等,为了保证检测精度,需要频率和幅值都很稳定的交流电源。交流检测电桥如图2所示。
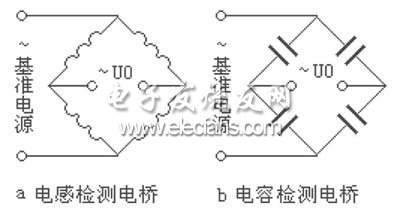
图2 交流检测电桥
通常单相交流电源的频率稳定度较高,由于电源内阻和导线阻抗的存在,电网电压幅值受负载电流的影响较大,一般是负载电流越大,电网电压衰减也越大。因此设计交流稳压电源的主要任务就是适时地根据负载端电压衰减状况调节电压幅值,使输出电压相对稳定。
采用模拟量调压可以获得较好的输出电压波形,但是调压设备自身损耗较大,能量传输效率较低;采用高频率开关量占空比调压,能量传输效率高,由于开关频率较高,虽存在高次谐波污染,但定周期调占空比的调压方式,谐波较易滤除。如何兼顾二者的优势,成为设计交流稳压电源的关键。
2 数控交流调压原理
2.1 交流稳压基本原理
首先在只考虑电阻性负载的情况下,应用微型计算机的反馈控制技术,结合数控交流调压电路、模数转换电路、脉宽调制、开关晶体管脉冲驱动电路、交流变极性输出电路、LC脉冲续流滤波电路、交流幅值检测电路、软件定值与比较运算、PID数控增益驱动等电路组成交流可调稳压电源,组成方框如图3所示。
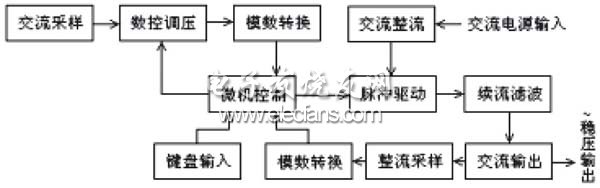
图3 数控交流稳压电源组成框图
基本设计思想是在采样的低电压小电流端进行微处理器的数控线性调压,将幅值调校后的正弦交流信号作高频采样、AD转换送微处理器,运用微处理器的运算功能,求解与正弦交流对应的PWM输出信号,经脉冲驱动电路作大幅值脉冲输出,再经续流滤波还原成波形平滑的大幅值正弦交流电。为了构成可调的负反馈控制,对输出的正弦交流电压作分压、采样、整流、平均值滤波,此平均电压值对应正弦交流电压有效值,经AD转换后送微处理器与键入的给定值做比较,用设定的算法把比较后产生的偏差信号转换成小信号交流调压电路的数字调节量,完成对输出交流电压的闭环负反馈控制,实现在微处理器控制下的交流稳压输出。
由于采用集成芯片和少量外围元件,整体电路结构简单。交流电压的输出控制采用软件定周期调占空比的PWM方式,经脉冲驱动电路和脉冲续流滤波,使交流电源的输出效率高,由于对输入交流的采样频率高,使电源输出的电压波形好,当电网电压变化或负载变化时,交流稳压精度高(取决于数控位数)。输出的正弦交流经过简单滤波后,几乎无波形畸变,无明显的谐波污染。
特别适用于对交流电压稳定度要求较高,波形失真度小的检测环境。能量传输过程是:交-直-交方式。
2.2 双极性DA转换与数字调压控制
DA转换电路有一个优良的特性,简称为“瞬态转换,零阶保持”。巧妙地应用此电路。
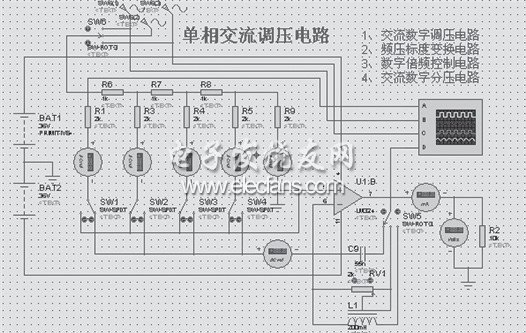
图4 数控交流调压电路
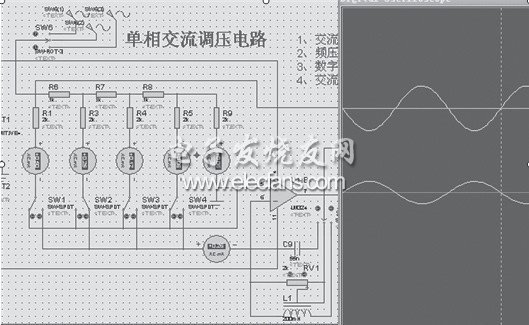
图5交流权值0100调压仿真一
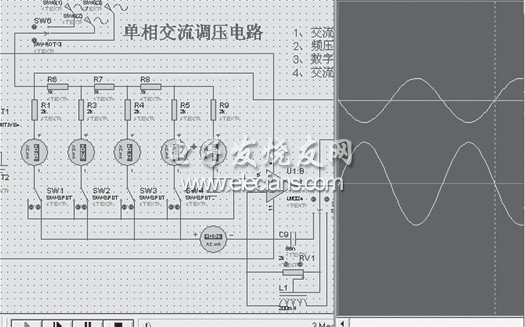
图6 交流权值1111调压仿真二
将其移植到交流调压电路中,参看图4数控交流调压电路。基准电压输入端,接来自电网的交流采样电压,运放反向输入的权值电流受基准电压与数控开关两方面控制,基准电压是正弦的则输出电压反向后也按正弦规律变化。来自单片机的数字量改变数控开关状态,则可改变输出正弦交流电压的幅值。其输出电压表达式为:uo=-Rf (ΣIi)。参看图5交流权值调压仿真一、图6交流权值调压仿真二。当交流采样电压一定时调反馈电阻Rf使输出电压幅值在0~2.5V范围内受数字量控制,若数字量是二进制8位,则可控量化级数是2的8次方为256,典型芯片有如DAC0832,调压步进值近似为10mV,调压过程几乎是连续可调。
2.3 交流幅值采样与AD转换控制
相对于工频50Hz而言,逐位比较型ADC0809的转换速度已经足够快了,可以省去采样保持电路。又由于ADC转换工作于直流状态,对来自DAC0832的双极型交流信号需加直流偏置,芯片ADC0809的最高位则表示幅值的正负。转换后的数字量传输给单片机作为PWM的数据。ADC0809与单片机的连接电路参看图7。
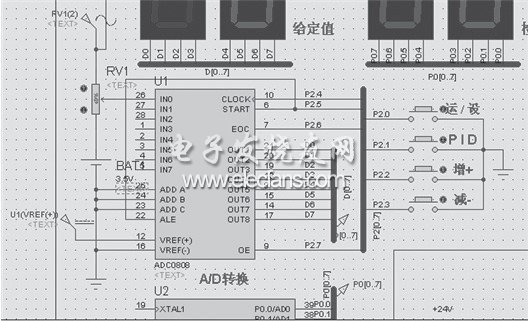
图7 ADC0809与单片机的连接电路
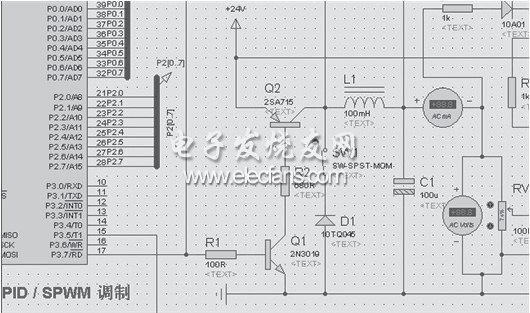
图8 单片机PWM脉宽驱动电路
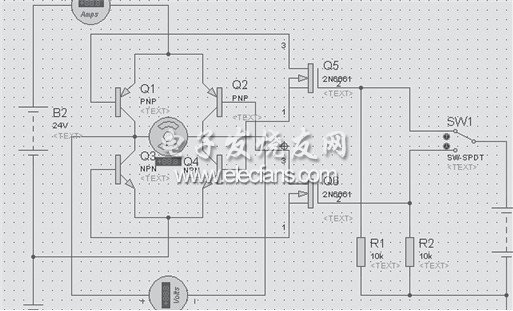
图9 单电源变极性交流输出仿真电路
2.4 单片机PWM与输出驱动
单片机采用定周期调占空比的方式实现PWM调制。其输出有两种方式可供选择,一种输出方式的脉冲宽度受来自ADC0809的直流偏置+交流幅值的数据控制,脉宽高、低电平延时量按正弦脉动直流规律变化,这种方式的输出电路和程序编写都简单,但输出端需增加隔直流电容,适用于输出功率不大的应用场合,如图8单片机PWM脉宽驱动电路所示;另一种是以ADC0809输出的最高数字位作为正负符号位(所加的直流偏置幅值),对负数求补后再决定输出脉冲宽度,这相当于用软件整流,输出的脉宽按全波整流波形的规律变化,为使输出电压按正弦交流变化,输出电路需增加极性变换电路,不需要隔直流电容,单片机需增加变极性控制端子,这种方式适用于输出功率较大且不适用隔直流电容的应用场合。
请参看图9单电源变极性交流输出仿真电路。
3 单片机PWM的交流稳压原理
电源在实际使用中往往由于电网电压或负载电流的变化导致电压波动,严重影响电桥测量的精确度。要实现稳压,必然要引入闭环的负反馈控制。对交变的正弦信号,如何确定给定值和反馈值是实现交流稳压的关键。
3.1 交流给定值的确定
交流给定值的确定有很多方法,如采用数表法确定每一采样时刻的给定值,此方法需要的存储空间很大,而且要求精度越高,所需存储空间越大,不太适合存储空间有限的单片机。一种简单有效的方法是采用默认值加键入增减值作为给定值,这是一个数字量,对应着正常交流输入情况下的交流输出有效值。
3.2 反馈值的检测与量化
对实际输出的交流电压作全波整流和平均值检测,然后量化为数字量,可采用的方法也很多,如模数转换型或压频变换计数型均可。此数字量对应着实际输出的交流有效值。在调试过程中,调试程序中的相关参数,或调试电路参数,使正常情况下输出的电压有效值达到给定值时,反馈的数字量等于给定值数字量。
3.3 偏差信号的PID调节
不论是电网电压变化,或是负载电流的变化,都反映在稳压电源输出电压的变化上,应用单片机对反馈值与给定值的差值作数字PID调节,输出的数字量用以调节输入端的数控增益放大器,只要满足闭环反馈控制为负反馈性质,就可实现无静差的稳压控制,使交流输出电压有效值稳定在给定值上。
如果只要求输出电压稳定,允许有静差存在,可以只采用P比例度控制,这样可使控制算法大为简化。有关P、PI、PD、PID控制性能对比如图10PID阶跃响应曲线所示。
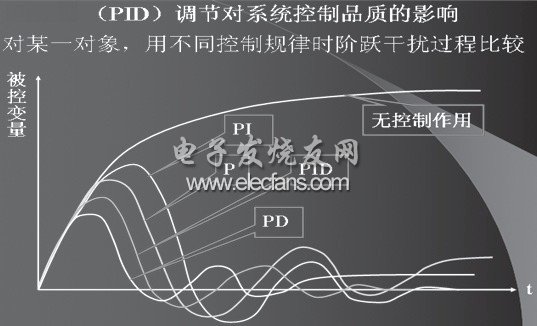
图10 PID阶跃响应曲线
由图示阶跃响应曲线可知,P和PD控制算法都存在静差。
如果将电网电压的变化作前馈检测,与微处理器的闭环负反馈控制结合构成前馈-反馈控制,则会在电网电压波动时提高控制的响应速度,使电网电压的波动不影响稳压输出,取得更好的稳压效果。
3.4 PID控制算法的特点
PID是经典的工业过程控制算法,通常应用于工作速度不很高的控制过程中。根据不同的控制对象和控制要求,可分别采用比例控制P,比例-积分控制PI,比例-微分控制PD和比例-积分-微分控制PID。其中比例控制的主要作用是对偏差的放大量,以提高控制灵敏度,但输出量是以偏差的存在为依存的,通常输出存在静差;积分控制的主要作用就是消除静差,但会使响应速度减小;微分控制则可提高响应速度,也存在静差。有阶跃响应曲线图10还可以看出,采用PID调节是响应速度最快的无静差控制。
2.2 双极性DA转换与数字调压控制
DA转换电路有一个优良的特性,简称为“瞬态转换,零阶保持”。巧妙地应用此电路。
图4 数控交流调压电路
图5交流权值0100调压仿真一
图6 交流权值1111调压仿真二
将其移植到交流调压电路中,参看图4数控交流调压电路。基准电压输入端,接来自电网的交流采样电压,运放反向输入的权值电流受基准电压与数控开关两方面控制,基准电压是正弦的则输出电压反向后也按正弦规律变化。来自单片机的数字量改变数控开关状态,则可改变输出正弦交流电压的幅值。其输出电压表达式为:uo=-Rf (ΣIi)。参看图5交流权值调压仿真一、图6交流权值调压仿真二。当交流采样电压一定时调反馈电阻Rf使输出电压幅值在0~2.5V范围内受数字量控制,若数字量是二进制8位,则可控量化级数是2的8次方为256,典型芯片有如DAC0832,调压步进值近似为10mV,调压过程几乎是连续可调。
2.3 交流幅值采样与AD转换控制
相对于工频50Hz而言,逐位比较型ADC0809的转换速度已经足够快了,可以省去采样保持电路。又由于ADC转换工作于直流状态,对来自DAC0832的双极型交流信号需加直流偏置,芯片ADC0809的最高位则表示幅值的正负。转换后的数字量传输给单片机作为PWM的数据。ADC0809与单片机的连接电路参看图7。
图7 ADC0809与单片机的连接电路
图8 单片机PWM脉宽驱动电路
图9 单电源变极性交流输出仿真电路
2.4 单片机PWM与输出驱动
单片机采用定周期调占空比的方式实现PWM调制。其输出有两种方式可供选择,一种输出方式的脉冲宽度受来自ADC0809的直流偏置+交流幅值的数据控制,脉宽高、低电平延时量按正弦脉动直流规律变化,这种方式的输出电路和程序编写都简单,但输出端需增加隔直流电容,适用于输出功率不大的应用场合,如图8单片机PWM脉宽驱动电路所示;另一种是以ADC0809输出的最高数字位作为正负符号位(所加的直流偏置幅值),对负数求补后再决定输出脉冲宽度,这相当于用软件整流,输出的脉宽按全波整流波形的规律变化,为使输出电压按正弦交流变化,输出电路需增加极性变换电路,不需要隔直流电容,单片机需增加变极性控制端子,这种方式适用于输出功率较大且不适用隔直流电容的应用场合。
请参看图9单电源变极性交流输出仿真电路。
3 单片机PWM的交流稳压原理
电源在实际使用中往往由于电网电压或负载电流的变化导致电压波动,严重影响电桥测量的精确度。要实现稳压,必然要引入闭环的负反馈控制。对交变的正弦信号,如何确定给定值和反馈值是实现交流稳压的关键。
3.1 交流给定值的确定
交流给定值的确定有很多方法,如采用数表法确定每一采样时刻的给定值,此方法需要的存储空间很大,而且要求精度越高,所需存储空间越大,不太适合存储空间有限的单片机。一种简单有效的方法是采用默认值加键入增减值作为给定值,这是一个数字量,对应着正常交流输入情况下的交流输出有效值。
3.2 反馈值的检测与量化
对实际输出的交流电压作全波整流和平均值检测,然后量化为数字量,可采用的方法也很多,如模数转换型或压频变换计数型均可。此数字量对应着实际输出的交流有效值。在调试过程中,调试程序中的相关参数,或调试电路参数,使正常情况下输出的电压有效值达到给定值时,反馈的数字量等于给定值数字量。
3.3 偏差信号的PID调节
不论是电网电压变化,或是负载电流的变化,都反映在稳压电源输出电压的变化上,应用单片机对反馈值与给定值的差值作数字PID调节,输出的数字量用以调节输入端的数控增益放大器,只要满足闭环反馈控制为负反馈性质,就可实现无静差的稳压控制,使交流输出电压有效值稳定在给定值上。
如果只要求输出电压稳定,允许有静差存在,可以只采用P比例度控制,这样可使控制算法大为简化。有关P、PI、PD、PID控制性能对比如图10PID阶跃响应曲线所示。
图10 PID阶跃响应曲线
由图示阶跃响应曲线可知,P和PD控制算法都存在静差。
如果将电网电压的变化作前馈检测,与微处理器的闭环负反馈控制结合构成前馈-反馈控制,则会在电网电压波动时提高控制的响应速度,使电网电压的波动不影响稳压输出,取得更好的稳压效果。
3.4 PID控制算法的特点
PID是经典的工业过程控制算法,通常应用于工作速度不很高的控制过程中。根据不同的控制对象和控制要求,可分别采用比例控制P,比例-积分控制PI,比例-微分控制PD和比例-积分-微分控制PID。其中比例控制的主要作用是对偏差的放大量,以提高控制灵敏度,但输出量是以偏差的存在为依存的,通常输出存在静差;积分控制的主要作用就是消除静差,但会使响应速度减小;微分控制则可提高响应速度,也存在静差。有阶跃响应曲线图10还可以看出,采用PID调节是响应速度最快的无静差控制。
|
|



