|

- UID
- 1023166
- 性别
- 男
- 来自
- 燕山大学
|

[导读] 设计背景及原理概述
关键词:LCD1604安芯一号
一、项目设计背景及概述
随着科技的不断发展,无线的应用越来越广泛,遥控玩具及航模也越来越受欢迎,航模用的遥控都是模拟量遥控,有着灵活的方位、速度及角度控制,而一般玩具的遥控都是开关量的,其不像模拟量遥控通过AD可以得出很多种状态,而开关量的遥控只有开和关两种状态。一般的玩具遥控如遥控车的遥控都是通过按键控制其前进、后退及转弯等动作,但这过于随着社会的发展这种遥控车越来越无趣,没有手机的赛车游戏好玩。
手机的赛车游戏是基于手机自带的重力感应功能的,既然能通过重力感应,为什么不能做出一个单独重力感应遥控器呢。本次设计通过水银开关实现这个遥控器的设计。水银开关运用于重力感应方面的应用已经有了,而运用于遥控车的应用较少,我将设计一个更完善的重力遥控车。
二、项目设计原理
1、 原理概述
本次设计分为两部分,遥控部分和小车部分。遥控调节AD可控制小车的速度,倾侧遥控器可控制小车的运动方向。遥控的实时数据将显示在LCD1602上。
2、 硬件设计原理
遥控底板:插接LCD1604并能够引出控制引脚,通过杜邦线插接到SLH核心板,底板还装上3路水银开关感倾侧方向。
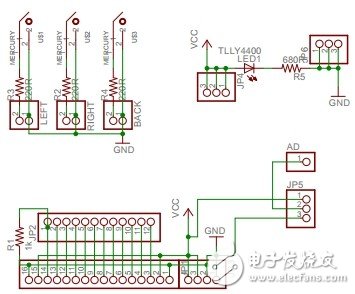
图1 遥控底板原理图
5V转3.3V控制:因为NRF24L01的电压范围为2.7V~3.6V左右,而安芯一号供电电压要大于3.6V,因此必须通过转接电路连接控制。如图2所示。
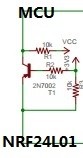
图2 5V—3.3V转接
电机驱动:如图3所示当DIR=1时,T3,T4导通,T1,T2截止,当PWM为低电平时,T5,T6导通,T7,T8截止,电机正转;当DIR=0时,T1,T2导通,T3,T4截止,当PWM为高电平时,T7,T8导通,T5,T6截止,电机反转。
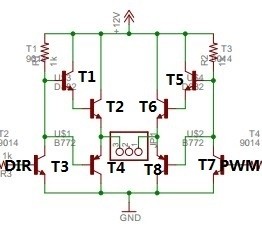
图3 H桥
3、 软件设计原理
遥控部分:通过安芯一号的AD转换得到一个8位精度的数值作为小车的速度值,通过调节电位器就可调节小车的速度。另外还有3路水银开关,将遥控摆向不同方位就可使水银开关断开或闭合,通过检测所连接的引脚的电平可知道遥控侧向方向。所测得的速度值和方向通过LCD显示或通过串口发到串口助手上。最后安芯一号将速度值和方向通过无线模块发向小车。
图4 遥控部分的程序模块
小车部分:无线模块接收遥控发过来的速度值并存储在安芯一号中,安芯一号匹配速度值控制两路PWM输出来控制小车速度,然后匹配方向值,控制减速电机的运作。
图5 小车部分的程序模块
三、项目设计框图
1、硬件设计框图

图6 硬件设计框图
2、软件设计框图

图7 软件设计框图
四、测试结果
如图8、9、10为遥控器,基本功能已实现。
a.通过调节电位器可得到不同的速度值;
b.通过倾侧遥控器可得到不同的方向值;
c.速度值和方向值会显示在LCD1602上;
d.速度值和方向值成功通过NRF24L01发送至小车。

图8 遥控器底板正面图

图9 遥控器正面图

图10 遥控器背面图
如图11所示为小车,基本功能已实现,但电机存在速度不同步的问题。
a.通过串口1调试NRF24L01成功正确接收遥控发送过来的数据;
b.遥控发送过来的速度值可对PWM的占空比进行调节;
c.遥控发送过来的速度值可驱动两路电机进行相对应的运动。

图11 遥控器底板正面图
|
|



