ADSP——美国模拟器件公司(ADI : Analog Device Instrument)生产的数字信号处理芯片(DSP igital Singal Processor),代表系列有 ADSP Sharc 211xx (低端领域),ADSP TigerSharc 101,201(高端领域),ADSP Blackfin 系列(消费电子领域)。 igital Singal Processor),代表系列有 ADSP Sharc 211xx (低端领域),ADSP TigerSharc 101,201(高端领域),ADSP Blackfin 系列(消费电子领域)。
ADSP与另外一个著名的德州仪器(TI: Texas Instrument)生产的芯片特点相比较,具有浮点运算强,SIMD(单指令多数据)编程的优势, 比较新的Blackfin系列比同一级别TI产品功耗低。缺点是ADSP不如TI的C语言编译优化好.TI已经普及了C语言的编程,而AD芯片的性能发挥比较依赖程序员的编程水平.ADSP的Linkport数据传输能力强是一大特色,但是使用起来不够稳定,调试难度大。
ADI提供的Visual DSP ++2.0, 3.0, 4.0, 4.5 编程环境,可以支持软件人员开发调试。下面是电子发烧友网编辑推荐的几个关于ADSP系列芯片的一些典型应用。
一、一种基于ADSP-2188M的多传感器数据采集系统
摘 要: 在移动智能体的研制中,能够实时地探测周围环境信息的传感器系统是至关重要的。本文介绍了一种以DSP-ADSP-2188M为核心的传感器数据采集系统的软、硬件设计和工作原理,以及与上位机通信的设计和实现过程。该系统可以应用于移动机器人、智能轮椅、自动制导车辆等移动智能系统中。
引言
在自主移动机器人系统、智能轮椅、自动制导车辆等智能移动系统中,需要实时地采集未知和不确定环境中的信息,以完成避障、环境地图绘制、导航、定位等运作,然后进行路径规划等任务。这些任务必须依靠能实时感知环境信息的传感器系统来完成。为了在复杂环境中获取有效的信息,这些系统往往安装有种类各异的传感器。目前,常用的有视觉、激光、红外、超声等传感器。激光传感器价格昂贵,而且在室内的结构化环境中存在镜面反射的问题。同时,超声波传感器以其性价比高,硬件实现简单等优点,被广泛地应用到感知系统中。同时,超声传感器也面临镜面反射的问题,方向性上也有欠缺。所以,在众多传感器采集系统中还实现了红外传感器和相位敏感器件(PSD)的数据采集。
随着微电子技术和计算机集成芯片制造技术的不断发展和成熟,数字信号处理芯片(DSP)由于其快速的计算能力,不仅广泛应用于通信与视频信号处理,也逐渐应用在各种高级的控制系统中。AD公司的ADSP-21xx系列提供了低成本、低功耗、高性能的处理能力和解决方案。其中的ADSP-2188M指令执行速度高达75MIPS,加上独立的算术逻辑单元,拥有强大的数字信号处理能力。此外,大容量的RAM被集成到该芯片内,以形成真正的单芯片控制器,可以极大地简化外围电路设计,降低系统成本和系统复杂度,也大大提高了数据的存储处理能力。我们设计的多传感器数据采集系统以ADSP-2188M为核心控制器。本文着重介绍该系统的软、硬件设计和工作原理,并给出实验结果。
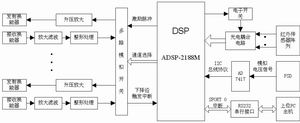
图1 多传感器数据采集系统方框图
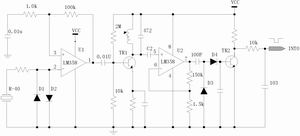
图2 超声波接收电路
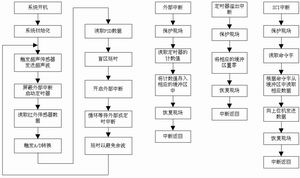
图3 系统软件流程图
系统的硬件设计
整个多传感器数据采集系统的结构如图1所示。从图中可以看出,系统由DSP主控制器、超声波环境探测电路、红外传感器数据采集电路、PSD数据采集电路和通信模块等部分组成。系统的核心为ADSP 2188M,主要完成对各种传感器的控制,信号的发射与接收,信息的融合及与上位PC主机进行通讯等功能。由于系统对传感器的信息已经进行了集中的预处理,与PC上位机进行通信的数据量将得到很大的降低,RS232串口通信方式已经能够满足系统在实时性方面的要求。
超声波环境探测电路
超声波探测电路主要由16路超声波发生电路和超声波接收电路等模块组成。移动智能系统在运动过程中需要实时地了解环境信息,常常根据实际需要将超声传感器均匀地布置在系统四周,从而构成环境探测系统。超声测距的原理较简单,一般采用渡越时间法,即:
D=Ct / 2 (1)
其中D为移动机器人与被测障碍物之间的距离,C为声波在介质中的传输速率,t为渡越时间,声波在空气中传输速率为:
(2)
其中,T为绝对温度。在不要求测距精度很高的情况下,一般可以认为C为常数。测量超声波从发射到返回的时间间隔t,然后根据式(1)计算距离。
超声波发射部分主要由激励信号发生电路,缓冲升压放大和超声波换能器等环节构成。超声波发射过程是:首先由DSP控制多路模拟开关ADG438F,选择性地启动16路发射电路中的4路。然后由ADSP2188M的一个I/O口产生脉宽为25μs的40kHz的调制脉冲波,通过缓冲放大器7406,再经变压器升压放大电路产生幅度达60V的瞬间高能激励信号,同时激发4路超声换能器产生超声波信号。ADG438F的最大开启时间为250ns,不会影响系统的实时性。
超声波的接收与发射必须协调一致工作,才能保证信号准确灵敏的接收。接收部分主要由接收换能器、放大滤波、整形触发输出等环节组成,如图2所示。由于超声波在传播中,其能量会随传输距离的增大而减小,从远距离障碍物反射的回波信号一般比较弱(为mv级),所以需要经过多级信号放大处理。本系统采用了三级放大处理,将信号放大约150万倍,然后经整形电路输出。4路超声传感器接收电路将经过整形以后的信号作为中断申请信号,通过多路模拟开关再接入ADSP-2188M的外部中断引脚,触发DSP的外部中断。
实验测得该超声传感器的灵敏范围大约为30度,测距范围为0.30~3m,重复测距精度在1%以内。
红外传感器数据采集电路
红外传感器数据采集模块主要由8路红外传感器、光电隔离电路和电子开关组成。红外传感器的探测距离一般比较短,通常被用作近距离障碍目标的识别,可以在一定程度上弥补超声传感器盲区特性的不足。其输出为0或1的开关量。红外传感器一般在静态时工作电流为25mA左右,而在动态工作时可达60mA。因而,红外传感器阵列的使用将会对系统的供电系统带来很大的负担。为此,在红外传感器数据采集模块中引入三极管的电子开关,控制红外传感器的供电电源,当需要采集红外传感器信息时,才接通红外传感器的电源。经过实验测定,该电子开关的反应速度达到5.6μs,对系统的实时性几乎没有影响。
8路红外传感器的数据通过光电耦合电路直接连接到ADSP2188M的高8位数据线上,实现并行采集。
PSD数据采集电路
PSD数据采集电路由4个PSD传感器组成,用于目标距离的检测。它的工作原理就是通过测量发射和反射红外光之间的相位差来测量反射物体的距离,被测物体的颜色也不会影响其测距精度。PSD可以弥补超声传感器方向性差,测量响应时间较长等缺点。我们使用的是Sharp公司的GP2Y0A02YK红外测距器件。该器件能够把相位差的变化转化为输出电压的变化,可以连续的读出距离。测量范围为20~150cm,输出电压范围0~2.7V。
系统的软件描述
系统软件主要由主循环模块、超声回波中断接收模块、通讯模块等组成。具体流程图如图3所示。
隙钔獾氖奔淅醋槌擅で?邮薄Q邮币院缶涂梢钥?敉獠恐卸希?⒀?返却©超声回波信号。最后,不管有没有接收到回波,应该进行适当的延时,避免在室内工作环境下超声波的余波效应。
实验结果
首先,我们对多传感器数据采集系统中的超声传感器和PSD的测距性能进行了测试:让该系统的不同传感器对同一个目标进行测距,超声传感器的实际结果如表1所示。试验证明两种传感器的重复测量精度均在1%之内,两者之间的误差也不超过2%,精度完全能够满足一般移动智能系统的要求。
同时,为了验证整个多传感器数据采集系统的实时性,我们计算了系统的主循环模块在最差条件下(即所有的超声传感器都没有探测到回波信号),所用的时间约为35.33ms。也就是说,系统数据的更新频率能够达到30Hz左右,证明系统有良好的实时性。
结语
本文研究了一种高性能、低成本、低功耗多传感器数据采集系统的硬、软件实现和工作原理。系统以高性能的数字信号处理器ADSP2188M为核心处理器,集中实现多个红外、超声和PSD传感器数据的采集和传输。实验验证了硬件系统的可靠性、实时性和算法的有效性。
二、基于ADSP-21160的液晶驱动电路设计及系统软件实现
薄膜晶体管液晶显示器(TFT-LCD)具有重量轻、平板化、低功耗、无辐射、显示品质优良等特点,其应用领域正在逐步扩大,已经从音像制品、笔记本电脑等显示器发展到台式计算机、工程工作站(EWS)用监视器。对液晶显示器的要求也正在向高分辨率、高彩色化发展。
由于CRT显示器和液晶屏具有不同的显示特性,两者的显示信号参数也不同,因此在计算机(或MCU)和液晶屏之间设计液晶显示器的驱动电路是必需的,其主要功能是通过调制输出到LCD电极上的电位信号、峰值、频率等参数来建立交流驱动电场。
本文实现了将VGA接口信号转换到模拟液晶屏上显示的驱动电路,采用ADI公司的高性能DSP芯片ADSP-21160来实现驱动电路的主要功能。
硬件电路设计
AD9883A 是高性能的三通道视频ADC可以同时实现对RGB三色信号的实时采样。系统采用32位浮点芯片ADSP-21160来处理数据,能实 时完成伽玛校正、时基校正、图像优化等处理,且满足了系统的各项性能需求。ADSP-21160有6个独立的高速8位并行链路口,分别连接ADSP- 21160前端的模数转换芯片AD9883A和后端的数模转换芯片ADV7125。ADSP-21160具有超级哈佛结构,支持单指令多操作数 (SIMD)模式,采用高效的汇编语言编程能实现对视频信号的实时处理,不会因为处理数据时间长而出现延迟。
系统硬件原理框图如图1所示。系统采用不同的链路口完成输入和输出,可以避免采用总线可能产生的通道冲突。模拟视频信号由AD9883A完成模数转 换。AD9883A是个三通道的ADC,因此系统可以完成单色的视频信号处理,也可以完成彩色的视频信号处理。采样所得视频数字信号经链路口输入到 ADSP-21160,完成处理后由不同的链路口输出到ADV7125,完成数模转换。ADV7125是三通道的DAC,同样也可以用于处理彩色信号。输 出视频信号到灰度电压产生电路,得到驱动液晶屏所需要的驱动电压。ADSP-21160还有通用可编程I/O标志脚,可用于接受外部控制信号,给系统及其 模块发送控制信息,以使整个系统稳定有序地工作。例如,ADSP-21160为灰度电压产生电路和液晶屏提供必要的控制信号。另外,系统还设置了一些 LED灯,用于直观的指示系统硬件及DSP内部程序各模块的工作状态。
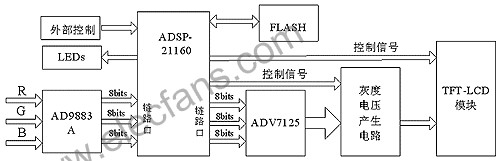
图1 系统硬件原理框图
本设计采用从闪存引导的方式加载DSP的程序文件,闪存具有很高的性价比,体积小,功耗低。由于本系统中的闪存既要存储DSP程序,又要保存对应于 不同的伽玛值的查找表数据以及部分预设的显示数据,故选择ST公司的容量较大的M29W641DL,既能保存程序代码,又能保存必要的数据信息。
图2为DSP与闪存的接口电路。因为采用8位闪存引导方式,所以ADSP-21160地址线应使用A20~A0,数据线为D39~32,读、写和片选信号分别接到闪存相应引脚上。
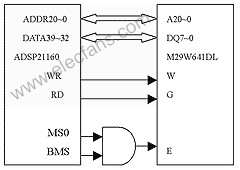
图2 DSP和Flash的接口电路
系统功能及实现
本设计采用ADSP-21160完成伽玛校正、时基校正、时钟发生器、图像优化和控制信号的产生等功能。
伽玛校正原理
在 LCD中,驱动IC/LSI的DAC图像数据信号线性变化,而液晶的电光特性 是非线性,所以要调节对液晶所加的外加电压,使其满足液晶显示亮度的线性,即伽玛(γ)校正。γ校正是一个实现图像能够尽可能真 实地反映原物体或原图像视觉信息的重要过程。利用查找表来补偿液晶电光特性的γ校正方法能使液晶显示系统具有理想的传输函数。未校正时液晶显 示系统的输入输出曲线呈S形。伽玛表的作用就是通过对ADC进来的信号进行反S形的非线性变换,最终使液晶显示系统的输入输出曲线满足实际要求。
LCD的γ校正图形如图3所示,左图是LCD的电光特性曲线图,右图是LCD亮度特性曲线和电压的模数转换图。
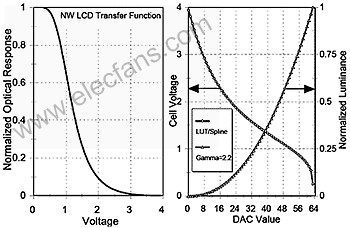
图3 LCD的γ校正示意图
伽玛校正的实现
本文采用较科学的γ校正处理技术,对数字三基色视频信号分别进行数字γ校正(也可以对模拟三基色视频信号分别进行γ校正)。在完成γ校正的同时,并不损失灰度层次,使全彩色显示屏图像更鲜艳,更逼真,更清晰。
某 单色光γ调整过程如图4所示,其他二色与此相同。以单色光γ调整为例:ADSP-21160 首先根据外部提供的一组控制信号,进行第一次查表,得到γ调整系数(γ值)。然后根据该γ值和输入的显示数据进行第 二次查表,得到经校正后的显示数据。第一次查表的γ值是通过外部的控制信号输入到控制模块进行第一次查表得到的。8位显示数据信号可查表数字 0~255种灰度级显示数据(γ校正后)。
图4 单色光γ调整的过程
图像优化
为了提高图像质量,ADSP-21160内部还设计了图像效果优化及特技模块,许多 在模拟处理中无法进行的工作可以在数字处理中进行,例如,二维数字滤波、轮廓校正、细节补偿频率微调、准确的彩色矩阵(线性矩阵电路)、黑斑校正、g校 正、孔阑校正、增益调整、黑电平控制及杂散光补偿、对比度调节等,这些处理都提高了图像质量。
数字特技是对视频信号本身进行尺寸、位置变 化和亮、色信号变化的数字化处理,它能使图像变成各种形状,在屏幕上任意放缩、旋转等,这些是模拟特技无法实现的。还可以设计滤波器来滤除一些干扰信号和 噪声信号等,使图像的清晰度更高,更好地再现原始图像。所有的信号和数据都是存储在DSP内部,由它内部产生的时钟模块和控制模块实现的。
时基校正及系统控制
由于ADSP-21160内部各个模块的功能和处理时间不同,各模块之间 存在一定延时,故需要进行数字时基校正,使存储器最终输出的数据能严格对齐,而不会出现信息的重叠或不连续。数字时基校正主要用于校正视频信号中的行、场 同步信号的时基误差。首先,将被校正的信号以它的时基信号为基准写入存储器,然后,以TFT-LCD的时基信号为基准读出,即可得到时基误差较小的视频信 号。同时它还附加了其他功能,可以对视频信号的色度、亮度、饱和度进行调节,同时对行、场相位、负载波相位进行调节,并具有时钟台标的功能。
控 制模块主要负责控制时序驱动逻辑电路以管理和操作各功能模块,如显示数据存储器的管理和操作,负责将显示数据和指令参数传输到位,负责将参数寄存器的内容 转换成相应的显示功能逻辑。内部的信号发生器产生控制信号及地址,根据水平和垂直显示及消隐计数器的值产生控制信号。此外,它还可以接收外部控制信号,以 实现人机交互,从而使该电路的功能更加强大,更加灵活。
三、基于CY7C68013A和FPGA的ADSP-TS101扩展USB接口设计
ADI公司的DSP器件(ADSP-TS101)具有浮点实时处理能力强、并行性好等优点,从而广泛被弹载信号处理系统选用。其作为弹载主处理器,在导弹的系统试验中,需要利用上位机对其中的大数据量的软件变量进行实时监控和记录,这就需要一个上行传输给上位机的高速通信接口,数据上行的数据率需要大于6 MB/s。同时这个通信接口还需具有双向特性,通过数据下行可实现在线程序加载与烧写。这样的通信接口,还需具备设备连接简单、通用性强等特性,并能实现远程(大于3m)数据传输。
ADSP-TS101自身的外总线接口和链路口(Linkport接口),虽速度很快,但连接复杂,难以长线传输,并不具备上述需求特征。可以通过在DSP的Linkport总线接口上增加FPGA实现的适配电路,扩展USB 2.0接口,实现上述应用需求。下文将介绍具体的实现方案。
1 系统总体方案
系统实现的总体方案如图1所示。
 在本方案中,USB接口芯片选用Cypress公司的CY7C68013A。该芯片是Cypress公司FX2系列USB 2.0集成微控制器之一。集成了USB 2.0收发器、SIE、增强8051微控制器和GPIF,是一种优秀的高速USB外设控制器。内置的8051微控制器独立于USB数据通道,由SIE实现大部分USB 1.1和USB 2.0协议;USB FIFO和外部从FIFO映射到相同的8个512 B RAM模块,实现内部传输和外部传输的无缝连接,可以较低的代价获得较高的带宽;8.5 KB内部RAM空间,可运行较为复杂的固件,实现软件对硬件的配置。GPIF是由用户可编程有限状态机驱动的柔性8/16位并行口,可编程GPIF向量组成一个GPIF波形,匹配受控接口的时序。 在本方案中,USB接口芯片选用Cypress公司的CY7C68013A。该芯片是Cypress公司FX2系列USB 2.0集成微控制器之一。集成了USB 2.0收发器、SIE、增强8051微控制器和GPIF,是一种优秀的高速USB外设控制器。内置的8051微控制器独立于USB数据通道,由SIE实现大部分USB 1.1和USB 2.0协议;USB FIFO和外部从FIFO映射到相同的8个512 B RAM模块,实现内部传输和外部传输的无缝连接,可以较低的代价获得较高的带宽;8.5 KB内部RAM空间,可运行较为复杂的固件,实现软件对硬件的配置。GPIF是由用户可编程有限状态机驱动的柔性8/16位并行口,可编程GPIF向量组成一个GPIF波形,匹配受控接口的时序。
ADSP-TS101作为弹载主DSP芯片,含4个链路口,每个链路口可在时钟双沿以8位进行双向数据传输,速率高达250 MB/s。通过该接口,DSP每个处理帧将预观测的变量结果以DMA的方式打包向上位机发送。
此外,ADSP21160的内部还设计了I2C总线控制模块,模拟I2C总线的工作,为外部的具有I2C接口的器件提供SCLK(串行时钟信号)和SDA(双向串行数据信号)。模拟I2C工作状态如图5和图6所示。
图5 串行端口读/写时序

图6串行接口-典型的字节传送
系统软件实现
在软件设计如图7所示,采用Matlab软件计算出校正值,并以查找表的文件形式存储,供时序的调用。系统上电开始,首先要完成ADSP- 21160的一系列寄存器的设置,以使DSP能正确有效地工作。当ADSP-21160接收到有效的视频信号以后,根据外部控制信息确定γ 值。为适应不同TFT-LCD屏对视频信号的显示,系统可以通过调整γ值,以调节显示效果到最佳。再如图4所示,对先前预存的文件进行查表, 得到所需的矫正后的值,然后暂存等待下一步处理。系统还可以根据视频信号特点和用户需要完成一些图像的优化和特技,如二维数字滤波、轮廓校正、增益调整、 对比度调节等。这些操作可由用户需求选择性使用。利用ADSP-21160还可以实现图像翻转、停滞等特技。最后进行数字时基校正,主要用于校正视频信号 中的行、场同步信号的时基误差,使存储器最终输出的数据能严格对齐,而不会出现信息的重叠或不连续。除了以上所述的主要功能以外,ADSP-21160还 根据时序控制信号,为灰度电压产生电路和TFT-LCD屏提供必要的控制信号。另外,ADSP-21160还能设置驱动通用I/O脚配置的LED灯,显示 系统工作状态。
图7 软件流程图
结束语
本文介绍了基于ADSP-21160的液晶驱动电路设计。该驱动电路能完成伽马校正、图像优化及时基校正等功能,并能提供具有足够驱动能力的时序和 逻辑控制信号,能驱动大部分的TFT-LCD。用ADSP-21160设计驱动电路实时性好、通用性强、速度快且高效;而且还能在ADSP-21160中 嵌入其他功能模块控制,增强系统的功能。这样不仅充分利用了ADSP-21160资源,又节省了外部资源,简化了硬件电路的设计。作者将SONY的 LCX029CPT显示屏应用在本文所设计的驱动电路上,显示出质量很高的图像,因此该设计满足驱动液晶显示器的要求。 | 




