首页
|
新闻
|
新品
|
文库
|
方案
|
视频
|
下载
|
商城
|
开发板
|
数据中心
|
座谈新版
|
培训
|
工具
|
博客
|
论坛
|
百科
|
GEC
|
活动
|
主题月
|
电子展
注册
登录
论坛
博客
搜索
帮助
导航
默认风格
uchome
discuz6
GreenM
»
DSP技术
» 采用Arduino为核心控制的智能小车避障系统
返回列表
回复
发帖
发新话题
发布投票
发布悬赏
发布辩论
发布活动
发布视频
发布商品
采用Arduino为核心控制的智能小车避障系统
发短消息
加为好友
porereading
当前离线
UID
863084
帖子
7183
精华
0
积分
3592
阅读权限
90
在线时间
209 小时
注册时间
2011-11-30
最后登录
2019-8-28
论坛元老
UID
863084
1
#
打印
字体大小:
t
T
porereading
发表于 2015-6-28 21:28
|
只看该作者
采用Arduino为核心控制的智能小车避障系统
智能机器人
,
传感器
,
技术
,
精密
人工智能技术是与多门基础学科联系紧密、相互促进相互发展的前沿技术,是集计算机、物理学、生理学、控制技术、传感器技术等于一体的高新技术产业。人工智能技术的应用领域也越来越广泛,除了传统的工业领域,人工智能技术的应用也涉及到军事、娱乐、服务、医疗等领域“。
随着机器人技术的不断发展,人们对机器人的要求也越来越高,机器人的智能化已成为当今的热点。智能小车作为一种四轮驱动的智能机器人,它行动灵活、操作方便,车上可集成各种精密传感器数据处理模块,其避障功能保证了智能小车在行进过程中行进方向的自行调节,避免发生碰撞、碰擦,是智能小车的重要组成部分。目前,智能小车大多采用单个传感器实现单面避障,但单面避障存在着固有的缺陷,如:障碍物探测缓慢、避障成功率较低等。由此,设计了一种能全方位避障的智能小车系统,采用红外单点避障与超声波双路避障相结合的模式,可实现多面自动探测,并实现全方位避障,有效提高了避障的成功率和效率。
1系统设计
设计的避障系统采用红外单点避障与超声波双路避障相结合的模式,以实现对障碍物的全方位有效避障。为此,在小车前端中央设置一个红外避障传感器,用于探测小车前方障碍物,再在小车前端两侧设置左右两个超声波避障传感器,他们分别探测小车前方左右两侧障碍物,有效的扩大了探测范围,从而实现了小车的全方位避障。
本系统利用多模块协调配合,使其具有较高自适应能力。硬件以需求为基础,选择了合适的模块,总体模块中包含:电源模块,红外传感模块,超声波传感模块,电机驱动模块,Arduino模块等。系统整体框图如图1所示。
图1系统硬件结构图
1.1 Arduino模块
设计中采用Arduino duemilanove作为核心控制模块,Arduino是一款便捷灵活且十分方便上手的开源电子原型平台,能通过各种各样的传感器来感知环境,通过灯光、电机和其他的装置来反馈、影响环境。
Arduino duemilanove包括以下几个部分:一个9 V DC输入,一个USB接口,14个数字IO口,6个模拟IO口,1个5 V DC输出和一个3.3 V DC输出。它的核心是一片Atmega 328单片机。
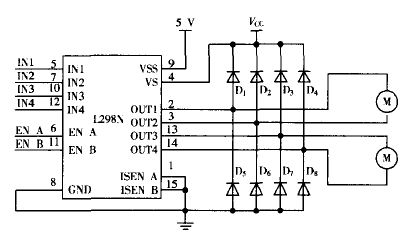
1.2电机模块
小车采用双直流电机驱动方式,通过控制左右两个直流电机来控制小车转动转向,电机模块如图2所示,直流电机采用直流电机驱动芯片L298N。
L298N内部包含4通道逻辑驱动电路,是一种二相和四相电机的专用驱动器,即内含二个H桥的高电压大电流双全桥式驱动器,接收标准TTL逻辑电平信号,可驱动46V、2A以下的电机,正好可以满足小车的左右直流电机的驱动要求。并且L289N具有过温保护功能和较高的噪声抑制比,故十分适用于智能小车中。
图2电机模块
由于芯片L298N并没有对电机转速的控制方式,因此,通过Arduino程序控制调节驱动电机的PWM信号,改变电机输出功率,从而控制左右电机的转速。
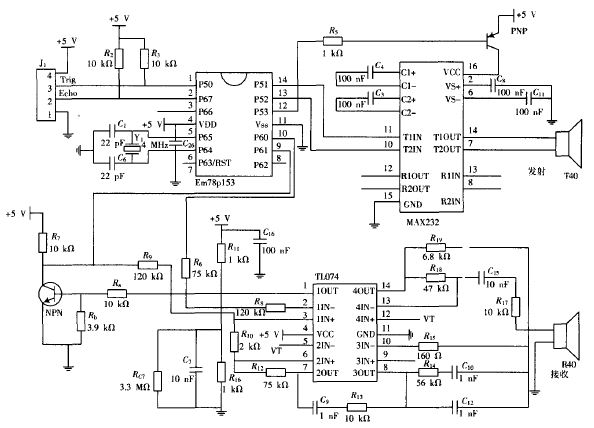
1.3超声波传感器模块
超声波模块由发射电路和接收电路组成,如图3所示。其中发射电路由Em78p153单片机、MAX232及超声波发射头T40等组成,接收电路由TL074运算放大器及超声波接收器R40等组成。
图3超声波传感器
探测时,超声波发射器发射出长约6 mm,频率为40 kHz的超声波信号。此信号被物体反射回来由超声波接收器接收,接收器实质上是一种压电效应的换能器。它接收到信号后产生mV级的微弱电压信号,电压信号再在核心控制模块中转换为数字信号。设超声波脉冲由传感器发出到接收所经历的时间为t,超声波在空气中的传播速度为c,则从传感器到目标物体的距离D可用D=ct/2求出。
1.4红外传感器模块
红外测距模块采用夏普GP2YOA21红外测距传感器,夏普GP2YOA21型红外测距传感器是基于位置敏感传感器PSD(Position Sensitive Device)的微距传感器,捕捉的是光信号并且有着基于Lucovusky方程的电路设计,其有效的测量距离为80 cm.
红外测距其优点是无盲区、测量精度高、反应速度快,但其缺点受环境影响较大、探测距离较近。因此本文设计了基于多传感器信息融合的智能小车避障系统,采用红外传感器与超声波传感器互补,使机器人具有精确的感测范围。
收藏
分享
评分
回复
引用
订阅
TOP
返回列表
嵌入式技术
测试测量
FPGA/CPLD可编程逻辑
X86
汽车电子
MCU 单片机技术
无线技术
电源与功率管理
电商论坛
Pine A64
资料下载
方案分享
FAQ
行业应用
消费电子
便携式设备
医疗电子
汽车电子
工业控制
热门技术
智能可穿戴
3D打印
智能家居
综合设计
示波器技术
存储器
电子制造
计算机和外设
软件开发
分立器件
传感器技术
无源元件
资料共享
PCB综合技术
综合技术交流
EDA
MCU 单片机技术
ST MCU
Freescale MCU
NXP MCU
新唐 MCU
MIPS
X86
ARM
PowerPC
DSP技术
嵌入式技术
FPGA/CPLD可编程逻辑
模拟电路
数字电路
富士通半导体FRAM 铁电存储器“免费样片”使用心得
电源与功率管理
LED技术
测试测量
通信技术
3G
无线技术
微波在线
综合交流区
职场驿站
活动专区
在线座谈交流区
紧缺人才培训课程交流区
意见和建议