|

- UID
- 863084
|

车辆检测器作为交通信息采集的重要前端部分,越来越受到业内人士的关注。鉴于公路交通现代化管理和城市交通现代化管理的发展需要,对于行驶车辆的动态检测技术——车辆检测器的研制在国内外均已引起较大重视。车辆检测器以机动车辆为检测目标,检测车辆的通过或存在状况,其作用是为智能交通控制系统提供足够的信息以便进行最优的控制。
工作原理本系统采用MSP430F1121A单片机与环形线圈相结合的方法对行驶车辆进行检测,是一种基于电磁感应原理的检测器。传感器线圈为通过有一定电流的环形线圈,当被检测铁质物体通过线圈切割磁力线,引起线圈回路电感量的变化,检测器通过检测该电感变化量就可以检测出被测物体的存在。本文利用由环形线圈构成回路的耦合电路对其振荡频率进行检测。但线圈检测易受车辆、湿度、温度等外界环境的影响,基准频率会产生漂移,从而影响检测效果。同时,由于车型、车体、车速的不同,亦会影响检测的准确性。针对这些情况,本文提出了一种软件动态刷新检测基准的方法,以及抗干扰的软件数字滤波方法,充分利用MSP430系列单片机的片上资源对线圈频率进行检测,有效提高了检测的准确性与可靠性。
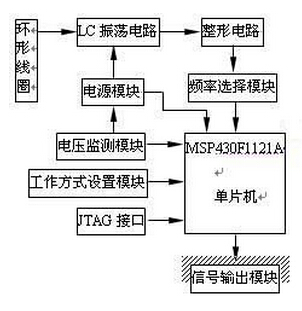
系统结构系统以MSP430F1121A单片机为核心,由环形线圈传感器模块、LC振荡电路、整形电路、频率选择模块、电源模块、电压监测模块、工作方式设置模块、信号输出模块及JTAG等组成。系统结构框图如1所示。
各模块原理及硬件实现环形线圈传感器是一只埋在路面下的矩形线圈,其两端引线接车辆检测器。环形线圈的作用相当于LC振荡回路中的电感L,当有金属物体靠近时,其电感量发生变化,从而引起振荡频率的改变。通过对频率的检测、比较,可以判断车辆的驶入或驶出。由它组成的LC振荡电路与整形电路一起构成了信号输入电路,如图2所示。
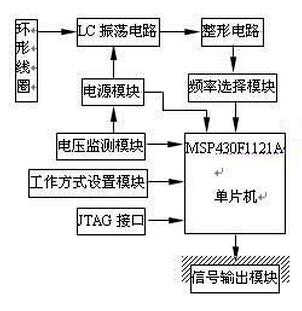
图1系统更新示意图
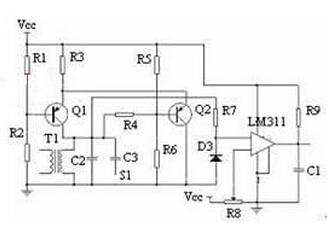
图2信号输入电路示意图
环行线圈与行驶车辆之间是通过电磁场进行耦合的。当车通过环形线圈并处在一定的位置时,在车体中引起的涡流是一定,而涡流对环形线圈的影响也是一定的,车辆与环形线圈之间存在着一定的互感。于是,我们把车辆看作具有电感L1和电阻R1的短路环,它通过互感M与环形线圈相交链。由振荡电路提供,电感为L2,电阻为R2.其中第一项L2的变化幅度与车辆的导磁率有关,第二项与电涡流效应有关。若工作频率选择适当,当有车辆通过环形线圈时,式第一项的变化量将小于第二项,即等效电感减小。显然,当车辆通过环形线圈时,L变小,则f增大,通过单片机检测电路测得其频率的变化,从而可判断有无车辆通过。
电路中由三极管Q1和Q2组成共射极振荡器,电阻R3是两只三极管的公共射极电阻,并构成正反馈。Tl为磁罐变压器,起着阻抗变换和与外电路隔离的双重作用。其绕组Ll通过引线外接环形线圈,环形线圈的感抗通过Tl反射到绕组L2,形成等效电感L,L与并联的电容Cl形成振荡回路,LC值决定了振荡频率。开关Sl闭合时,电容C2与Cl并联,电容量增加,振荡频率降低,由此来设置高低两种振荡频率是考虑到现场的不同情况,以便取得较好的检测效果。LC振荡电路输出的是带毛刺的正弦波,不适合单片机做数字化处理,因此需要单向稳压二极管和单门限电压比较器将其转变为方波信号输出。
由于不同应用场合中,LC振荡电路的振荡频率不近相同,故输出的方波信号通过一计数器进行分频,再由频率选择接口送入单片机的P2.5口,从而避免了单片机的计数溢出,增强了单片机对信号处理的灵活性。MSP430F1121A单片机为16位RISC指令结构;内置4kBFlash和256BRAM;一个l6位定时器Timer-A和看门狗定时器;一个具有3种内部参考电平和输出带RC滤波的比较器等。 |
|