一种改进的B3G MIMO-OFDM系统的帧同步方法
|
 
- UID
- 1023230
|

一种改进的B3G MIMO-OFDM系统的帧同步方法
0 引言
正交频分复用(OFDM)是一种多载波传输方案,它的特点是各子载波相互正交,扩频调制后频谱可以相互重叠,不但减小了子载波间的相互干扰,还大大提高了频谱利用率。OFDM系统能够很好地对抗频率选择性衰落和窄带干扰。MIMO(多人多出)是一种革命性的天线技术。MIMO系统的特点是将多径传播变为有利因素。它有效地使用随机衰落及多径时延扩展,在不增加频谱资源和天线发送功率的情况下,不仅可以利用MIMO信道提供的空间复用增益提高信道的容量,同时还可以利用。MIMO信道提供的空间分集增益提高信道的可靠性,降低误码率。而MIMO技术和OFDM技术的结合可以在不需要增加带宽和传输功率的前提下提高数据传输速率,使高速无线通信系统的实现成为可能。因此MIMO-OFDM技术被广泛应用于Beyond 3G等先进移动通信系统中。
同步是当前MIMO-OFDM系统研究的关键技术之一。随着天线数目与用户数目的逐渐增加,发射天线增多导致发射信号不但受到ISI与ICI干扰,还有天线间干扰,无线信道不确定性增加,导致MIMO-OFDM系统的同步在实现中比起SISO-OFDM系统要困难得多。目前研究MIMO-OFDM同步的文献还很少,因此研究适用于高速多天线系统的同步是十分必要的。到目前为止,已有大量文献对OFDM系统的同步技术进行研究,大致分为基于循环前缀和基于训练序列2种,其中用得比较多的是Schmidl和Tufvesson等人提出的基于训练序列的同步算法,被广泛应用于各种高速无线通信系统中。但他们都没有给出同步中关键参数——同步判决门限的设置方法,是不完备的,因此本文在他们的基础上进行改进,提出了一种有效的门限设置方法。
1 MIMO-OFDM系统模型
若系统发送天线数为Q,接收天线数为L,考虑不同发送天线到不同接收天线传输时延不同带来的影响时,MIMO-OFDM系统模型如图1所示。
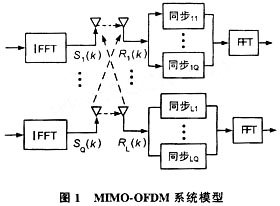
设IFFT长度为N,经N点IFFT变换后输出的信号进行加循环扩展操作,循环扩展长度G应大于最大时延扩展以避免符号间干扰,然后将信号通过AD变换转化为模拟信号,再通过上变频转化为射频信号发送至空中;经信道传输后,将接收采样信号经过下变频及DA变换转换为数字基带信号,在数字域对每个发送接收天线对进行定时同步,再将已同步信号经去循环扩展后进行N点的FFT变换。
设Si(k),i=1,…Q为第i根天线的发送信号,在不考虑频率偏移的条件下,第i根接收天线接收到的信号可以表示为:

其中wj(k)表示均值为0的加性高斯白噪声(AWGN),对于不同的i、k、j不相关。Hij(k)为第i根发送天线到第j根接收天线第k个子载波上的信道冲激相应。dij是第i根发送天线到第j根接收天线的传输时延。
2 各种同步算法介绍
同步技术包括帧同步和载波频率同步,在OFDM系统中,接收机需首先确定接收OFDM符号的起始时刻,然后估计接收机与发射机之间的载波频率偏移,进行载波频率偏移补偿,最后进行FFT解调。如果不达到准确的帧同步,引起的符号误差将造成FFT窗口错位,导致符号间干扰,使接收端无法正确接收数据。
OFDM同步方法可分为数据辅助的同步方法和盲同步方法。数据辅助同步方法需训练序列,这降低了数据传输效率,但这类方法有估计精度高的优点,一般其计算复杂度较低。在数据辅助的同步方法中,较早的一篇是Classen提出的,文中利用散布在OFDM符号中导频进行频率粗同步和精同步,其粗同步是在一定范围内进行盲搜索,计算量很大。后来Schmidl对此方法进行了改进,Schmidl利用的是2个OFDM符号作训练序列进行时间和频率同步,第1个符号的前一半和后一半相同,可用于时间同步和频率精同步,利用前后2个符号间关系进行频率粗同步。Schmidl提出的时间同步方法中,时间同步的目标函数顶部比较平坦,同步不很精确。Tufvesson提出了基于PN序列的时间同步算法,利用本地预存的PN序列与接收数据做相关寻找最大值的方法获得时间同步信息。此方法的优点是精确度比较高,可同时获得粗同步和细同步。本文将在不改变发送端发送的训练序列的基础上,在接收端的关键参数上进行改进以获得更好的性能。
盲同步方法主要有Van de Beek等人提出的利用循环前缀的时间和频率同步方法,后人大部分也是在此基础上进行改进。由于循环前缀是用于抗多径时域扩展的,利用它作同步不需增加新的开销,这提高了系统带宽效率。盲同步方法不需额外数据作训练序列,它有带宽效率高的优点,但盲同步方法一般有计算复杂度高的缺点,且在多径衰落信道中,CP极易受到多径干扰,破坏OFDM符号的周期特性。本文讨论基于同步训练序列的帧同步算法,其利用本地训练序列和接收码字序列进行相关获得时间同步的信息,在多径衰落信道中具有更为精确的同步估计性能。
3 基于训练序列的帧同步
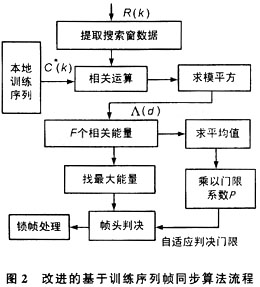
帧同步即是要寻找OFDM帧起始位置。传统基于训练序列的帧同步算法流程如图2所示。发送端先发送一个一定长度的训练序列,一般为PN序列,MIMO-OFDM系统中这个训练序列可选取为互相关性好的GOLD序列。接收端在每帧数据到来时截取一个搜索窗(在一定范围内搜索),搜索窗的大小可根据芯片的处理能力以及接收数据的采样速率选取,设搜索窗大小为F。首先,以搜索窗内的第1个采样相位点作为数据的起始点,将接收数据与预先存储的本地同步训练序列IFFT变换结果{C(k)}的共轭序列做相关运算即累加求和,然后滑动至下一个相位点求相关值,依此类推,在搜索窗内总共可以得到F个相关结果。设接收序列为{R(n)},则第d个相关值可通过公式

计算产生。将F个相关结果求平方后,找出最大值,与门限相比较,比门限大的相关值对应的码元位置即为帧起始位置。
最后引入锁帧处理,当某一定时位置在连续出现一定次数时,则设此定时位置为锁定的帧起始位置,并设此时的锁帧状态为锁定;在锁帧状态为锁定时,若出现与锁定的定时位置不同的定时值时,更改锁帧状态为未锁定,并记录出现不同定时值的次数,当其达到一定次数时,清除锁定的定时值,重新开始搜索帧头。
4 帧头判决门限方案及仿真结果
由于OFDM有循环前缀保护,故寻找的帧起始位置只要在循环前缀范围内即可。故MIMO-OFDM系统对于帧同步精确性的要求不是很高,但是对稳定性和快速性要求很高,如果达不到稳定的时间同步,后面的FFT等一系列数据处理过程就会受到影响,从而极大地影响整个系统的性能。故稳定的时间同步对整个MIMO-OFDM系统显得更加重要。由于信道的时变特性和多径衰落的影响,给帧同步的稳定性带来很大的困难,因此需要在前人的基础上加入一种新的机制,来保证同步的稳定性。而这个帧头判决门限是影响稳定性的主要因素。
传统的同步算法常采用固定的相关门限作为帧头的判决门限,但在多天线系统中,多根发送天线的发送信号均到达同一接收天线,加之无线信道对多根天线进行不相关衰落,将造成接收信号的更为严重、更加快速的衰落,因此采用传统的固定门限将导致同步虚警与误警率的成倍增加。引入自适应的判决门限可以对接收信号的衰落进行自适应的调节,将使同步性能得以提高。Tufvesson的同步方法中仅仅提到这个判决门限应该是变化的,没有给出具体方法。此处,给出一种利用相关能量确定判决门限的方法,即搜索窗内,比所有相关能量均值的Pthreshold倍要大的最大值判为帧起始位置,此方案得到的是主径的位置。

式中,F为搜索窗大小,Λ(d)为接收序列与本地序列的相关结果,Pthreshold为门限系数。计算时可把分母与门限系数相乘作为门限与最大相关值比较。由于相关值的均值是随信道变化而变化的,接收信号幅度大时这个均值也会大,接收信号幅度小时这个均值也会小,因此这个门限是随接收信号幅度变化而自适应变化的,因此可以有效地对抗无线信道的码间干扰和多径。实际实现中,由于相关结果Λ(d)已经计算出来,F也可以乘到不等式右边,因此只需要计算每个搜索窗内F个相关能量值的和即可,故此方案不会增加实现复杂度。
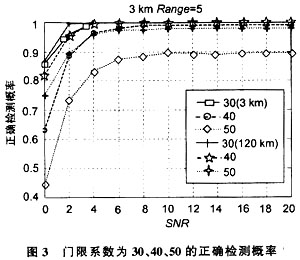
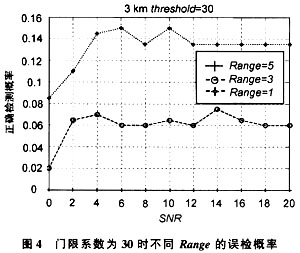
LTE信道下,车速3 km/h和120 km/h,帧同步范围Range为5(帧头±5点范围内算同步上),门限取30、40、50时的性能如图3所示。由此可知,无论是低速或高速,门限系数取30比40和50正确检测概率要高,且信噪比在2 dB以上时,门限系数30可使正确检测概率达到1。图4是门限取30时不同的同步范围的误检概率,可见当同步范围取5时,可使误检概率为0。由此可见此方案更适用于未来高速移动通信的高车速环境。实际中,门限取30、Range取5的方案已经在载频为3.41 GHz、最高速率达100 Mbps的B3G-TDD MIMO-OFDM硬件平台中得到实现。
5 结束语
MIMO-OFDM系统作为当前高速通信的备选方案已越来越多地受到关注,随着天线数和用户数的增加,帧同步在实现中也越来越困难。本文在前人算法基础上,提出一种自适应门限的帧头判决方案,使算法更加完善,且在不增加系统复杂度的前提下获得很好的性能,适用于Beyond 3G等未来高速移动通信系统。 |
|
|
|
|
|


