一、项目设计背景及概述
清洁机器人是服务机器人的一种,所谓服务机器人是指自主或半自主的、从事非生产活动、能完成有益于人类健康的服务工作的机器人。家庭清洁机器人集机械、电子、传感器、计算机、控制、机器入技术、人工智能等诸多学科为一体,能够自动进行房间地面的家庭卫生服务。在一些发达国家的很多公共场合已经开始使用清洁机器人,随着清洁机器人性价比的提高,清洁机器人进入家庭成为可能。
家用吸尘器作为当今家庭的主要的日常清洁工具,会与用户形成频繁的互动关系,产品和消费者产生一种直接的接触与沟通。近些年,智能手机发展迅速并得到了广泛的普及,成为许多人的生活与工作的必需品,如果能够用手中的智能手机就完成对吸尘器的的有效控制,将会为人类的清洁工作带来极大的便利。智能手机与清洁机器人结合,兼具智能手机良好的操作体验和清洁机器人便利又高效的清洁作用。
此次深联华单片机大赛提供的“三防”单片机给我们提供了一个很好的平台来实现我们的想法,融合智能手机以及机器人领域的关键技术,本课题旨在开发一种成本低能够充分满足家庭需求且方便适用的智能家庭清扫机器人。使它可以替代传统的家庭人工清扫方式使家庭生活电气化、智能化使科技更好地为人类服务。
二、项目设计原理
2.1、原理概述
清洁机器人需要完成的任务是能够在房间中自动清洁地面。工作时,利用各种传感器测得环境信息,并做出决策,实现边行走边打扫,完成预定的任务。典型的清洁机器人主要由以下几个模块组成:
(1)信息采集模块
(2)决策模块
(3)运动控制模块
(4)清扫模块
这四个部分构成了完整的清洁机器人系统,如图2-1所示。信息采集模块返回当前清洁机器人的位置信息,如是否碰到障碍物、是否遇到楼梯等,然后把这些信息送给决策模块进行决策,控制运动控制模块,使机器人转弯或者后退等,在机器人运动的同时让清扫模块进行清扫,完成打扫地面的任务。
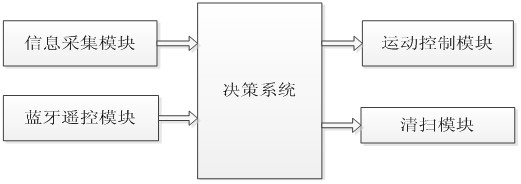
图2-1清洁机器人系统典型组成示意图 四、测试结果
实物测试结果均完成各项功能,在视频中已经展示,在此不再赘述。
链接: http://pan.baidu.com/s/1bnkWCUz
密码: e3i3
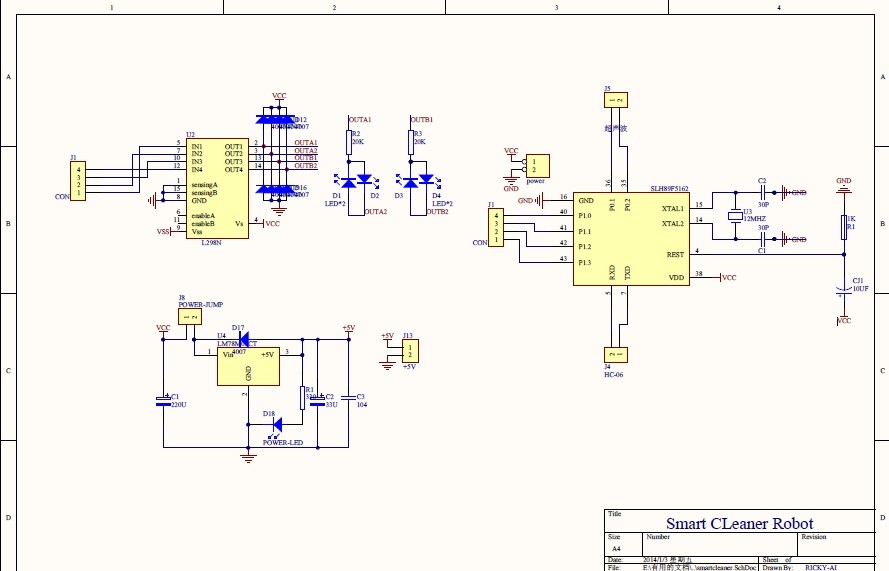
五、附件
附一:硬件电路图
| 



