STM32中,需要用串口接收数据,是使用串口中断来接收数据。但是用这种方法的话,就要频繁进入串口中断,然后处理,效率就比较低。于是就想到用DMA来接收串口数据,这个STM32也是支持的。但是关键的一点,怎么知道数据接收完毕了呢?如果接收的数据长度固定,那就好办,直接设置DMA的接收数据个数就行了。但是如果长度不固定了,那应该怎么办了?
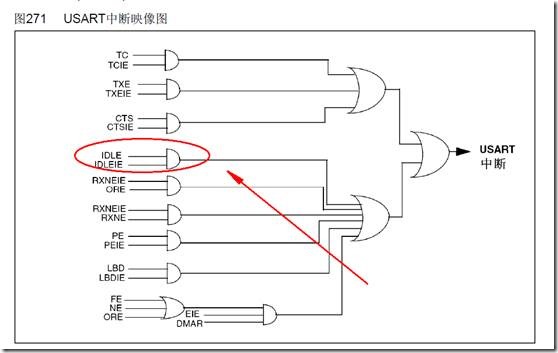
这个时候,就要用到STM32在串口中提供的另一个好用的东西了,就是串口空闲中断。在STM32的串口控制器中,设置了有串口空闲中断,即如果串口空闲,又开启了串口空闲中断的话,就触发串口空闲中断,然后程序就会跳到串口中断去执行。有了这个,是不是可以判断什么时候串口数据接收完毕了呢?因为串口数据接收完毕后,串口总线肯定是会空闲的嘛,那这个中断肯定是会触发的了。
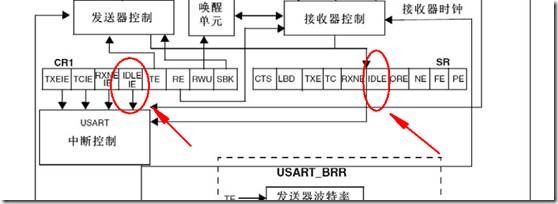
还有一个问题,这串口空闲中断是只要串口空闲就会产生吗?其实不是的,串口空闲中断要触发的话,是要RXNE位被置位后,串口总线空闲才会触发的。所以我们不用担心,串口数据发送完毕后,会不会触发串口空闲中断了。
下面用代码来说明。
1、
配置串口。包括设置串口的引脚配置,串口的配置,串口中断的配置,串口的接收DMA的配置
void USART_init(void){ GPIO_InitTypeDef GPIO_InitStructure; USART_InitTypeDef USART_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; //开启时钟 RCC_APB2PeriphClockCmd(USART_RCC,ENABLE); //配置TX端口 GPIO_InitStructure.GPIO_Pin = GPIO_USART_TX; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIO_USART_TYPE,&GPIO_InitStructure); //配置RX端口 GPIO_InitStructure.GPIO_Pin = GPIO_USART_RX; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_Init(GPIO_USART_TYPE,&GPIO_InitStructure); //配置串口模式 USART_InitStructure.USART_BaudRate = 115200; USART_InitStructure.USART_WordLength = USART_WordLength_8b; USART_InitStructure.USART_StopBits = USART_StopBits_1; USART_InitStructure.USART_Parity = USART_Parity_No;USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; USART_Init(USART1,&USART_InitStructure); //中断配置 NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; NVIC_InitStructure.NVIC_IRQChannelSubPriority=0; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); /* 若总线空闲,产生中断 */ USART_ITConfig(USART1, USART_IT_IDLE, ENABLE); /*开启串口DMA接收*/ USART_DMACmd(USART1,USART_DMAReq_Rx,ENABLE); USART_Cmd(USART1,ENABLE);}
代码比较简单,一看就明白了,这就是使用库函数开发的好处,代码易懂。这里,关键的是要开启总线空闲中断,并且开启串口DMA接收。注意,不要开启串口接收中断,不然接收数据就会一直产生中断了。 |






