首页
|
新闻
|
新品
|
文库
|
方案
|
视频
|
下载
|
商城
|
开发板
|
数据中心
|
座谈新版
|
培训
|
工具
|
博客
|
论坛
|
百科
|
GEC
|
活动
|
主题月
|
电子展
注册
登录
论坛
博客
搜索
帮助
导航
默认风格
uchome
discuz6
GreenM
»
MCU 单片机技术
»
ARM
» 基于AVR ATMega16 的PID 控制算法程序
返回列表
回复
发帖
发新话题
发布投票
发布悬赏
发布辩论
发布活动
发布视频
发布商品
基于AVR ATMega16 的PID 控制算法程序
发短消息
加为好友
yuchengze
当前离线
UID
1062083
帖子
5837
精华
0
积分
2921
阅读权限
70
在线时间
222 小时
注册时间
2016-6-30
最后登录
2018-9-9
金牌会员
UID
1062083
性别
男
1
#
打印
字体大小:
t
T
yuchengze
发表于 2016-9-18 14:36
|
只看该作者
基于AVR ATMega16 的PID 控制算法程序
结构体
,
朋友
,
程序
,
而且
,
计划
最近由于有些时间,于是想起了做一个
PID
设计,在网上收集了不少关于PID控制的理论,于是计划用mega16L做一个PID测试程序,发现一些意想不到的误差,不知各位同仁是否有遇到与我的类似的现象:我定义了一个PID结构体,在初始化的时候无法把每个元素的初始化值设置为0(见下面的仿真图),而且,PID结构体中的部分参数是应该不变的,在整个PID运算中,但是不应该变化的参数却在PID运算发生了变化,不知道是什么原因,到现在也无法查出原因。有兴趣的朋友可以一起参与讨论或有经验的朋友 给与相关帮助,谢谢!
详细的代码和仿真情况如下:(我的硬件系统是本站的min Mega16/32 + JTAG ICE)
#include "config.h"
struct _PID
{
float PVn; //反馈信号变量
float SPn; //设定值
float Mn; //PID运算结果
float Kc; //比例系数
float Ts; //采样时间(ms)
float Ti; //积分时间(ms)
float Td; //
微分
时间(ms)
float Mx; //积分项调整参数
float PVn_1;//前一次反馈变量
float MPn; //比例项的结果值
float MIn; //积分项的结果值
float MDn; //微分项的结果值
};
struct _PID *myPID;
void init_myPID(void);
void init_ports(void);
void init_device(void);
float MPn_value(struct _PID *PID);
float MIn_value(struct _PID *PID);
float MDn_value(struct _PID *PID);
float Mx_value(struct _PID *PID);
float Mn_value(struct _PID *PID);
void main (void)
{
init_device();
init_myPID();
myPID->SPn = 155.5;
myPID->Kc = 13.2;
myPID->Ts = 0.2;
myPID->Ti = 600.0;
myPID->Td = 0.0;
myPID->PVn = 108.2;
while(1)
{
myPID->MPn = MPn_value(myPID);
myPID->MDn = MDn_value(myPID);
myPID->Mx = Mx_value(myPID);
myPID->MIn = MIn_value(myPID);
myPID->Mn = Mn_value(myPID);
myPID->PVn_1 = myPID->PVn;
}
}
/******************************************************************************/
void init_myPID(void)
{
myPID->PVn = 0.0;
myPID->SPn = 0.0;
myPID->Mn = 0.0;
myPID->Kc = 0.0;
myPID->Ts = 0.0;
myPID->Ti = 0.0;
myPID->Td = 0.0;
myPID->Mx = 0.0;
myPID->PVn_1 = 0.0;
myPID->MPn = 0.0;
myPID->MIn = 0.0;
myPID->MDn = 0.0;
}
//------------------------------------------------------------------------------
void init_ports(void)
{
PORTA = 0x00; //If ADC Function was be used,the PORTA could`t set bit 1
DDRA = 0x00; //the port set input mode.
PORTB = 0x00;
DDRB = 0x00;
PORTC = 0x00; //m103 output only
DDRC = 0x00;
PORTD = 0x00;
DDRD = 0x00;
}
//------------------------------------------------------------------------------
void init_device(void)
{
CLI();
init_ports();
MCUCR = 0x00; //Set Power control(State:Close)
GICR = 0x00; //Set boot guide(State:Close).
SEI(); //re-enable
interrupt
s
//all peripherals are now initialized
}
// 计算 比例项的值
//------------------------------------------------------------------------------
float MPn_value(struct _PID *PID)
{
float myMPn = 0.0;
myMPn = PID->Kc *( PID->SPn - PID->PVn);
return myMPn;
}
//计算积分项的值
//------------------------------------------------------------------------------
float MIn_value(struct _PID *PID)
{
float myMIn = 0.0;
myMIn = PID->Kc*(PID->Ts/PID->Ti)*(PID->SPn - PID->PVn) + PID->Mx;
return myMIn;
}
//计算微分项的值
//------------------------------------------------------------------------------
float MDn_value(struct _PID *PID)
{
float myMDn = 0.0;
myMDn = PID->Kc * (PID->Td/PID->Ts) * (PID->PVn_1 - PID->PVn);
return myMDn;
}
//计算PID的结果
//------------------------------------------------------------------------------
float Mn_value(struct _PID *PID)
{
float myMn = 0.0;
myMn = PID->MPn + PID->MIn + PID->MDn;
return myMn;
}
//计算积分项的调整值
//------------------------------------------------------------------------------
float Mx_value(struct _PID *PID)
{
float myMx = 0.0;
if(PID->Mn > 1.0)
{
myMx = 1.0 - (PID->MPn + PID->MDn);
}
else if(PID->Mn < 0.0)
{
myMx = -(PID->MPn + PID->MDn);
}
return myMx;
}
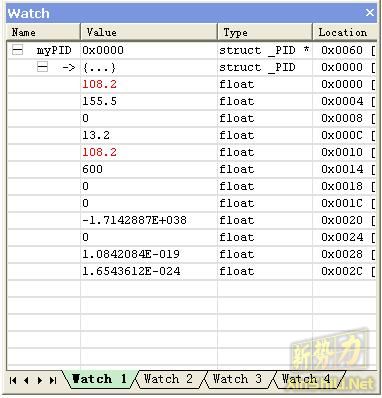
运行到PID初始化函数:void init_myPID(void)时的仿真结果如下:无法全部初始化为0
运行到:
myPID->SPn = 155.5;
myPID->Kc = 13.2;
myPID->Ts = 0.2;
myPID->Ti = 600.0;
myPID->Td = 0.0;
myPID->PVn = 108.2;
重新赋值后,部分参数Ts并不为0.2
收藏
分享
评分
回复
引用
订阅
TOP
返回列表
电商论坛
Pine A64
资料下载
方案分享
FAQ
行业应用
消费电子
便携式设备
医疗电子
汽车电子
工业控制
热门技术
智能可穿戴
3D打印
智能家居
综合设计
示波器技术
存储器
电子制造
计算机和外设
软件开发
分立器件
传感器技术
无源元件
资料共享
PCB综合技术
综合技术交流
EDA
MCU 单片机技术
ST MCU
Freescale MCU
NXP MCU
新唐 MCU
MIPS
X86
ARM
PowerPC
DSP技术
嵌入式技术
FPGA/CPLD可编程逻辑
模拟电路
数字电路
富士通半导体FRAM 铁电存储器“免费样片”使用心得
电源与功率管理
LED技术
测试测量
通信技术
3G
无线技术
微波在线
综合交流区
职场驿站
活动专区
在线座谈交流区
紧缺人才培训课程交流区
意见和建议