|

- UID
- 1029342
- 性别
- 男
|
3.3相电流检测
通过在相电流电路中串入一个分流电阻,测得其上的电压降以实现相电流检测。采样电阻上的电压降经滤波放大后输入到DSP56F805的ADC模块。由于系统中对功率开关的控制采用的是斩单管的方式,相电流并不是一直能从采样电阻上测到,只有在上下两个功率开关都开或都关的时候才可在采样电阻上测得。因此,电流采样需与PWM频率同步。同时,将电流的零点设置在ADC转换范围的一半处,使得采样电阻上的正负电压降都能被检测到。
3.4.控制策略与控制算法的实现
SRM的速度控制是通过速度调节器和电流调节器来实现的。考虑到积分环对大超调量的延迟性,为使系统有较快的响应,在速度环回路中串接一个积分分离开关 ,对速度环采用积分分离的PI控制算法。对电流环采用增量式PID控制算法。
依据电流环的输出值CMP,对DSP56F805的PWM模块的相应寄存器进行设置,则可从PWM模块输出占空比可变的PWM波形,从而实现对功率变换器高端的3个IGBT进行控制。
4.结论
本文以电机专用芯片DSP56F805为核心,成功实现了SRM速度电流双闭环控制。文中作者的创新点是在提出了一种简单适用的三相SRM的起动方法的同时,对速度环和电流环分别采用了积分分离PI控制算法和增量式PID控制算法,电机起动性能较好,相电流波形得到较好的改善。图4给出了电机起动时速度波形。其中,图a为速度和电流环均采用PID控制时的速度波形,图b为采用本文算法时的速度波形。从图中可以看出,当速度和电流环均采用PID方式时超调量大,响应速度慢,系统调节时间长,而采用本文提出的控制方式时超调量明显减少,速度响应快。
a) 速度和电流环均采用PID时速度波形
b)采用本文算法时的速度波形
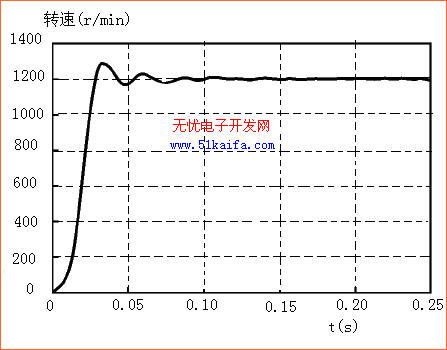
图4启动速度波形 |
|



