1、 前言
作为机器人的核心部分,机器人运动控制器是影响机器人性能的关键部分之一,它从一定程度上影响着机器人的发展。目前,由于人工智能、计算机科学、传感器技术及其它相关学科的长足进步,使得机器人的研究在高水平上进行,同时也为机器人控制器的性能提出更高的要求,对于不同类型的机器人,如有腿的步行机器人与关节型工业机器人,控制系统的综合方法有较大差别,控制器的设计方案也不一样。

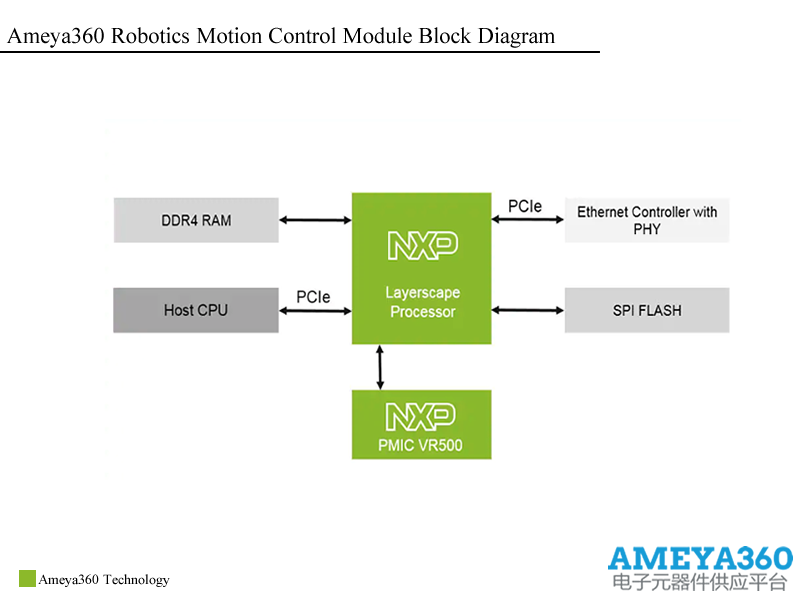
2、 方案概述
Ameya360 机器人运动控制器解决方案采用上、下位机二级分布式结构,上位机负责整个系统管理以及运动学计算、轨迹规划等。下位机由多 CPU 组成 , 每个 CPU 控制一个关节运动,这些 CPU 和主控机联系是通过总线形式的紧耦合,这种结构的控制器工作速度和控制性能明显提高。但这些多 CPU 系统共有的特征都是针对具体问题而采用的功能分布式结构,即每个处理器承担固定任务,目前世界上大多数商品化机器人控制器都是这种结构。
|




