|
 
- UID
- 864567
|
4 软件部分
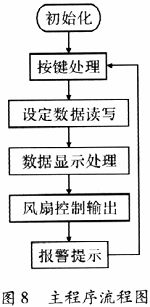
总程序流程图如图8所示,程序采用模块化设计,分成几部分的独立子程序。首先是按键判断子程序,采用矩阵式按键的扫描方式来编写程序,当有键按下时把相应的键值存储在RAM中,主程序根据键值来判断执行哪一段程序。设定数据有两种,一种是设定P值0~100%,对应帆板的角度,另外一种是设定A在0°~60°,同样,帆板的转角也会到达相应的设定值,然后进行数据显示处理,然后调整PI值进行风扇转速控制输出,如果帆板进入设定值的绝对值5°内,则红色发光二极管闪亮3次,同时蜂鸣器响3下;如果没有进入,则发光二极管不亮、蜂鸣器不响。
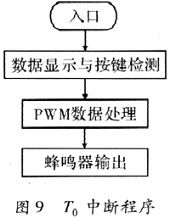
T0中断是数据显示和按键检测、PWM数据处理、蜂鸣器输出程序。如图9所示。
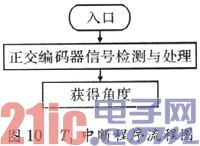
T1中断是正交编码器信号检测和处理程序,如图10所示。
T2中断产生PWM,脉宽调整。如图11所示。

5 系统调试与测试结果
(1)用手转动帆板,能显示帆板的转角度数。角度范围为0°~60°,分辨力为1°,经测试系统误差值为0°。(2)当间距d=7~15 cm时,通过操作键盘控制风力大小,控制帆板转角θ,θ在0°~60°,要求控制过程在5 s内完成,并实时显示,且有声光提示。

6 结束语
经测试,系统性能达到了设计要求,帆板角度控制属于自动化控制类,设计采用槽型光耦加360线光栅片组成的传感器能精确定位角度,是一种良好的角度控制传感器,再利用PID算法控制PWM参量,从而控制风扇的转速。 |
|



