详解基于CAN总线的汽车仪表系统—芯片选型与电路设计 2
|
 
- UID
- 864567
|

详解基于CAN总线的汽车仪表系统—芯片选型与电路设计 2
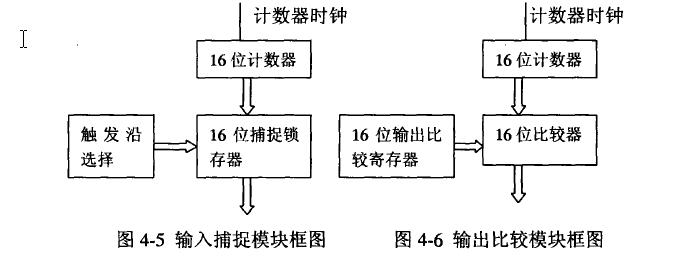
HCs12增强型定时器和HC12定时器一样,有8个输出比较瑜入捕捉通道,通过选择n0s寄存器的Iosx位可以在输出比较和输入捕捉的功能之间切换(见图4一5和图4一6)。
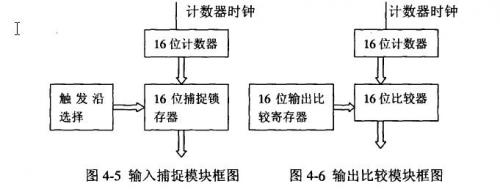
普通输入通道中带有一个捕捉寄存器用来记录管脚上电平变化时自由计数器的锁存值。在带缓冲的输入捕捉通道中,除了带有捕捉寄存器之外,还有一个保持寄存器,可以在不中断的条件下连续记录两次自由计数器的值。脉冲累加器与定时器中4个带缓冲的通道相连,通过检测相应管脚上的有效边缘来记录脉冲的个数。相邻的两个8位脉冲累加计数器可以联成为一个16位的脉冲计数器,用户可以选择4个8位或者2个16位累加计数器。定时器最常见的用法是用于内部定时和外部脉冲计数,脉冲累加器有两种工作模式:锁存方式和队列方式。
锁存方式:当模数计数器减为0、向模数计数器写入$仪刃0或写强制锁存位ICLA时,脉冲累加计数器将锁存到相应通道的保持寄存器中,并将累加计数器清零。
队列方式:当读取某通道保持寄存器的值时,相应的脉冲累加器的值将被写入该保持寄存器中并将脉冲累加器清零。
4.1.6.LCD接口模块
H128内部带有笔段式LCD驱动模块,可以驱动32个前极和4个背极,所有产生的波形均由片内的充电泵提供,不需采用外部元器件脚l。有4个1/0端口BPO一BP3专门用来驱动背极,其他32个前极驱动引脚为复用端口,从FPO一FP27,PT4一PT7。当LCD驱动模块禁止时,LCD显示将被关闭,所有的前极和后极驱动电压都为VDD,梯形电阻结构也将不在和VDD相连,以此来降低功耗。一般根据需要多少背极驱动来设置LCD输出波形的占空比,可以有三种设置方法:
1)静态占空比—仅使用BPO
2)1/3占空比—使用BPO、BPI和BPZ
3)1/4占空比—使用BPO、BPI、BPZ和BP3
当LCD驱动模块使能后,背极引脚就会按照设定好的占空比输出背极波形。背极波形是周期的。
4.1.7步进电机接口模块
H128内部集成了6个步专注电机驱动模块,无须在外围电路增加步进电机驱动芯片,是目前为止集成在芯片上驱动步进电机最多的汽车仪表芯片之一。其片内有单独的步进电机电源驱动模块,每路驱动两个步进电机。对应的引脚分别为PUO一PU7,PVO一PV7,PWO一Pw7,通过改变各引脚中的电平高低和频率来驱动步进电机按方向和速度运转。
4.1.8内部时钟生成模块和实时时钟
HCS12系列毗U具有内部时钟生成模块ICG.,可以不利用外部器件就可以为MCU产生稳定的时钟源,精度可达到士3.5%。内部时钟发生器具有可编程的时钟输出,同时可以选择外部时钟发生器,通过软件可选择总线时钟为内部或者外部时钟。HCS12系列MCU还具有实时时钟RTC模块,它可以提供实时时钟与日历功能,并具有年、月和日自动调整的作用,此外还可产生闹钟中断、周期性中断和0.015秒表记时中断。还可以根据闰年自动调整日历功能,其他中断包括报警中断、周期性中断和一个记时定时器。
4.1.9与其他开发方案的比较
由于51单片机在我国的普及与广泛应用,大多数的项目工程师都对51单片机的结构和性能非常熟悉。采用51单片机作为MCU,然后增加一个CAN控制器(如sJA10加)也可以组成一个CAN的节点,即51单片机+CAN控制器的模式。采用这种方式的特点是其结构简单易懂,开发费用比较低廉,大多数学生也可以有条件进行CAN节点的开发。其缺点是51单片机没有经过汽车上相关环境性能的试验,对于突发性的环境,会出现错误;同时,51单片机的珊口资源相对较少,需要扩充相当数量的外围电路,如多通道周D转换芯片,步进电机的驱动芯片,LCD的驱动芯片等等,致使外围电路结构复杂,工艺难度增加,性能也会相对降低,价格成本也比较昂贵脚]。也有部分在汽车仪表上使用的芯片如MICR0eHxP的PxC16F946系列PHILIPS的P8X591系列,FUJISTU公司的MB9()F系列的和Tl公司的TMS32OLF系列等,针对本方案的功能需求,也都存在着资源相对不足的问题。 |
|
|
|
|
|