|

- UID
- 863084
|
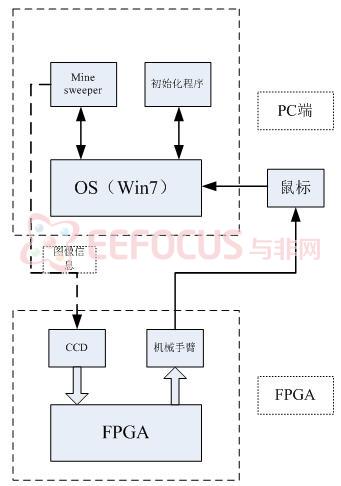
系统结构和功能简介
系统主要由三部分组成:
1、PC端的用于完成系统自我学习的初始化程序。
2、进行数字图像处理和模拟人类思维进行扫雷的决策模块。
3、机械手臂。
PC端初始化程序:
在系统开始进入游戏之前,初始化程序会配合嵌入式系统在电脑显示屏上生成相应的与扫雷游戏相关的图案,辅助系统完成自我学习过程。
决策模块:
这部分是系统的核心部分,主要由FPGA、摄像头等其它必要的外围设备组成,完成对电脑屏幕的图像采集,然后利用OPENCV或者Simulink编写的算法对图像进行处理,并根据游戏规则模拟人类的思维做出决策,这些决策包括对游戏中的哪个雷区小方块进行操作,进行怎样的操作(单击、右击、同时两个键双击),作出决策之后将决策信息输出给机械手臂。
机械手臂:
机械手臂的工作比较简单,包括对鼠标位置的精确移动,完成对鼠标按键的操作(单击、双击等)。机械手臂对鼠标进行控制来完成游戏,就像人控制鼠标一样。
图1.1 系统结构图
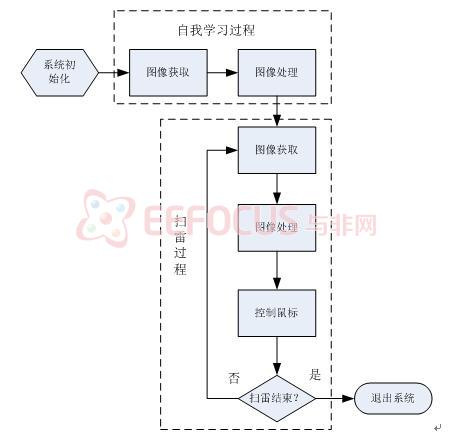
系统工作流程
系统的工作流程主要分为自我学习过程和扫雷过程,该过程由PC端的初始化程序辅助完成。
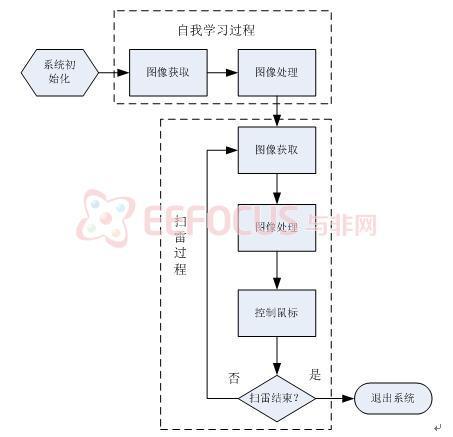
图2.1 系统工作流程图
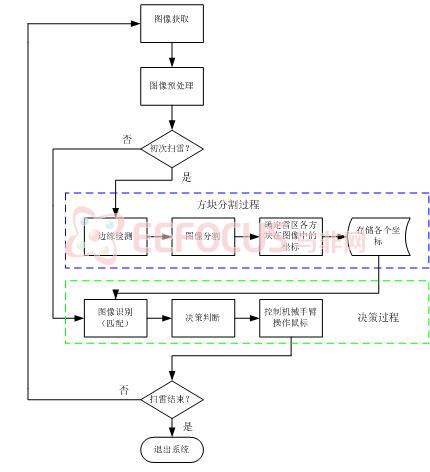
扫雷过程:
在介绍自我学习过程之前我们先介绍主要的扫雷过程,扫雷过程的流程图如图2.2所示。
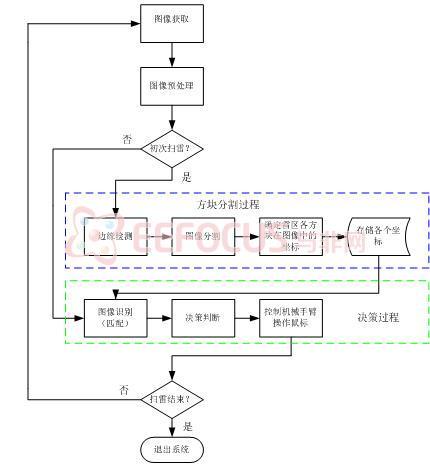
图2.2 扫雷过程流程图 |
|