电路图天天读(1):智能语音识别避障机器人电路模块设计
|

- UID
- 1023166
- 性别
- 男
- 来自
- 燕山大学
|

电路图天天读(1):智能语音识别避障机器人电路模块设计
SPCE061A是一款十六位单片机,使用它可以非常方便灵活的实现语音的录放系统,该芯片拥有8路10位精度的ADC,其中一路为音频转换通道,并且内置有自动增益电路。这为实现语音录入提供了方便的硬件条件。两路10位精度的DAC,只需要外接功放(SPY0030A)即可完成语音的播放。另外单片机具有易学易用的效率较高的一套指令系统和集成开发环境。在此环境中,支持标准C语言,可以实现C语言与凌阳汇编语言的互相调用,并且,提供了语音录放的库函数,只要了解库函数的使用,就会很容易完成语音录放,这些都为软件开发提供了方便的条件。
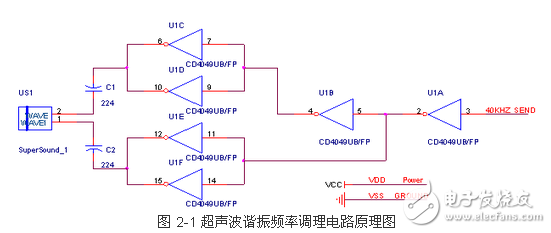
超声波发射电路模块
由单片机产生40KHz的方波,并通过模组接口(J4)送到模组的CD4049,而后面的CD4049则对40KHz频率信号进行调理,以使超声波传感器产生谐振。
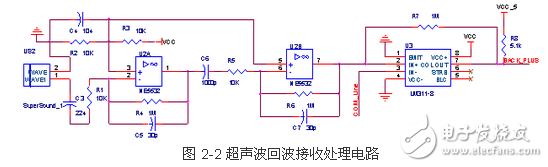
超声波回波接收处理电路模块
超声波接收处理部分电路前级采用NE5532构成10000倍放大器,对接收信号进行放大;后级采用LM311比较器对接收信号进行调整,比较电压为LM311的3管脚的输入,可由J1跳线选择不同的比较电压以选择不同的测距模式。
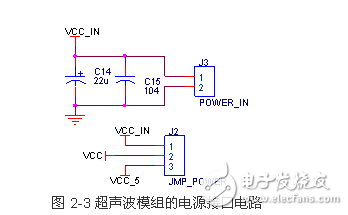
电源接口电路模块
为外部电源接口,最高电压不要超过12V,J2为电源选择跳线,VCC_5即为由61板通过10PIN排线引入模组的电源;VCC即为模组的放大器、调理电路的供电电源。当用户使用61板为其供电时,要把VCC与VCC_5V短接;而使用外部电源时,要把VCC与VCC_IN短接。
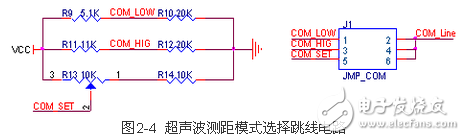
测距模式选择跳线模块
模组提供了测距模式选择跳线J1,可以选择短距测量模式、中距测量模式,或距离可调模式。跳线选择LOW时为近距测量模式,选择HIG时为中距测量模式;选择SET时为距离可调模式。凌阳科技大学计划提供了短距测量模式和中距测量模式的完整程序(其中ultrasonic_Low为短距测量模式程序;ultrasonic_long为中距测量模式程序)。
机器人驱动电路模块
机器人驱动电路采用功率较大的三极管搭成H桥来驱动电机,可以实现电机的正向旋转与电机的反向旋转。这些电机包括2个用于走路的电机与一个头部转向的电机。另外用了一个三极管驱动单向旋转的电机,包括加速电机与发射电机,驱动电路比较简单。

电子发烧友网技术编辑点评分析:
应用SPCE061A外加电机驱动控制电路可以实现多个电机的控制,完成机器人的许多动作。配合超声波传感器等感测装置,可以为机器人增加更多的功能。单片机爱好者可以自己制作电机驱动电路,选择多式多样的传感器,发挥想象力制作出自己的机器人。 |
|
|
|
|
|



