|

- UID
- 871057
- 性别
- 男
|

本帖最后由 forsuccess 于 2013-3-25 18:59 编辑
摘要:智能小车采用TI公司的MSP430F2274单片机作为核心控制芯片,由液晶显示模块、电机驱动模块、传感器模块、电源模块组成。在机械结构上,用两个直流电机作为两个前轮,再外加一个从动轮,使小车的转向更加灵敏。采用PWM驱动芯片控制电机,红外LED和一体化接收头来避障。基于可靠的硬件设计和稳定的软件算法,实现避障、测速等功能。
关键词:MSP430;避障;PWM脉宽调制;低功耗;红外传感器
智能机器人的发展非常迅速,已经广泛应用于机械、电子、交通等领域,人们也在不断地着力于改进机器人的智能,让它更好地为人们提供便捷、舒适的生活。而智能电动车作为机器人的典型代表,也在不断地发展,方便人们对安全性能的追求。
文中智能小车采用TI公司的MSP430F2274单片机作为核心控制芯片,由液品显示模块、电机驱动模块、传感器模块、电源模块组成。基于可靠的硬件设计和稳定的软件算法,实现智能避障、测速等功能。
1 系统设计
1.1 设计思路
本系统划分为控制部分和信号检测部分。其中信号检测部分包括:障碍物探测模块,路程测量模块。控制部分包括:电机驱动模块,显示模块,控制器模块,计时模块,状态标志模块。模块框图如图1所示。

1.2 设计方案
(1)控制器模块
本系统的控制器主要用于各个传感器信号的接收与辨认、控制小车电机的动作、控制显示车速与运行的时间以及小车在停止时发出声光等信号。
本系统的控制器采用TI公司的MSP430单片机。MSP430在电池供电的低功耗应用中具有独特的优势。其工作电压为1.8~3.6 V,正常工作时功耗可控制在200μA左右,低功耗模式可实现2μA甚至0.1μA的低功耗。MSP430系列单片机作为性能优异的MCU在中国已经得到了广泛的应用。MSP430具有高集成度,通常在单个芯片上集成了12位的A/D转换器、比较器、多个定时器,以及片内USART、看门狗、片内DCO等。一般单片就可满足大多数的应用需要。支持JTAG在线编程,可以方便地实现程序的下载、仿真、调试和升级。
(2)电机驱动模块
电机的驱动电路主要通过电机的正转和反转实现小车前后或者左右方向的选择,并使用PWM控制芯片来实现对电机的控制,L298芯片实现电机的驱动。
(3)显示模块
在小车运行过程中,需要对运行的时间和路程做必要的显示,系统选用液晶显示屏显示时间和路程。液晶显示屏(LCD)具有轻薄短小、低耗电量、无辐射危险,平面直角显示以及影像稳定不闪烁等优势,可视面积大,画面效果好,分辨率高,抗干扰能力强等特点。
(4)障碍物探测模块
采用左右两个红外传感器。红外传感器,是目前使用比较普遍的一种避障传感器,可调节红外传感器的检测距离为10~80 cm,开关量输出(TTL电平),简单、可靠。
(5)计时模块
计时模块要求对小车从启动到停止的过程进行计时,最小单位为0.01 s。由于本系统的控制器是由单片机构成的,其内部有很好的定时系统,因此系统使用MSP430F2274内置的定时器实现该模块功能。
(6)电源模块
双电源供电。电机驱动部分、显示电路、红外传感器部分用小型蓄电池供电。小型蓄电池具有,输出功率大,在负载不稳定的情况下能保证合适的电压和电流输出的特点。单片机和倾角传感器则对电压参数要求比较高.使用9 V干电池稳压到5 V。这样设计虽然不如单电源方便灵活,但可以将电极驱动所造成的干扰有较高的抑制,提高了系统的稳定性能。
2 系统的硬件电路设计与实现
2.1 控制电路的设计
单片机接收从传感器检测电路输入的逻辑信号和脉冲信号,并将输入的信号进行处理运算,以控制电流或控制电压的形式输出给被控制的单元电路,完成各项任务要求。 单片机MSP730F2274外接各种传感器电路和显示电路,其中金属探测电路和距离测量电路是信号输入,显示电路是信号输出。为了方便单片机引脚的使用,我们将单片机的所有引脚用接口引出。图2为控制电路模块电路图。

2.2 电机驱动电路的设计
电机的驱动芯片选用L298N。工作稳定电机驱动信号由单片机提供,信号经过光耦隔离后,传至PWM控制芯片L298N,通过L298N的输出脚与两个电机相连。此电机驱动电路如图3所示。
芯片引脚情况如表1所示,11脚为高时,当10脚电平高于12脚时,13脚,14脚端电机正转;12脚电平高于10脚时,电机倒转;11脚为低时,电机自由控制。
2.3 显示模块的设计
液晶显示模块以其微功耗、体积小、显示内容丰富、模块化以及接口电路简单等诸多优点在科研、生产和产品设计等领域中发挥着越来越重要的作用。
本系统中采用液晶屏来显示时间、路程、小车与起跑线的距离等信息。
图4所示为液晶与MSP430F2274的连接图。为节省I/O口,采用串口方式与单片机通信。

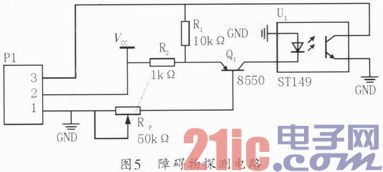
2.4 障碍物探测电路的设计
小车行驶线路中,有两个障碍物,要求小车绕过障碍物,避免与障碍物相撞。为了检测障碍物并确定障碍物的距离,在小车的前方安置两个红外线发射与接收电路。图5为障碍物探测电路。调节其电位器,可以改变红外发射与接收的距离。将红外检测到的信息发送到MSP430F2 274,并通过控制电机避开障碍物。
2.5 电源模块的设计
本系统要求有3.3 V,5 V,9 V混合输出可充电蓄电池电源。我们采用了一个蓄电池储存电提供系统用电要求,所以要设计一充电电路,由于单片机MSP430F2274需要工作在3.3 V的电压下,以达到低功耗的目的,而一些传感器,液晶等外围设备需要5 V与9 V的工作电压。所以我们利用一个7805三端5 V稳压管、一个7812三端12 V稳压管和一个AMS1085CT三端3.3 V稳压管做为电路主要组成部分。电路原理图如图6所示。

|
|


