|
 
- UID
- 1062083
- 性别
- 男
|

摘要 随着MEMS传感器的设计和制造工艺的进步,MEMS压力传感器被广泛用于医疗、汽车和消费电子等应用领域。例如,压力传感器可用于监测血压,汽车厂商利用气压传感器优化发动机能效,提醒驾驶员轮胎气压不足。
最近几年,随着MEMS压力传感器的性能不断提高,成本和尺寸不断降低,消费电子厂商开始使用压力传感器与惯性传感器和地磁传感器模组实现航位推测和导航功能。
本文论述如何在个人导航仪内利用MEMS压力传感器辅助GPS接收器测量海拔高度。本文第一部分概述大气压与海拔高度的关系。第二部门描述如何使用压力传感器计算海拔高度。第三部分介绍如何在一个个人导航仪如智能手机内集成压力传感器。
1. 大气压与海拔高度的关系
在个人导航仪中,MEMS压力传感器充当气压计用于测量海拔高度变化。因此,我们必须了解不同高度的大气压。
下面是大气压测量单位:
- psi – 磅/平方英寸
- cm/Hg – 水银柱高(厘米)
- cm/Hg – 水银柱高(英寸)
- Pa – 帕,国际制压力单位 (SI) ,1Pa = 1 N/m2
- bar – 巴,气压单位,1 bar = 105Pa
- mbar – 毫巴,1mbar = 10-3 bar
我们居住在地球大气层的底层,大气压随着海拔高度上升而降低。我们将在59 ℉时的29.92 in/Hg海平面气压规定为标准大气压,这个平均值不受时间影响,而受到测量点的地理位置、气温和气流的影响。
因此,上述压力单位之间的换算关系是:
1 个标准大气压 = 14.7 psi = 76 cm/Hg = 29.92 in/Hg = 1.01325 bar = 1013.25 mbar
可以用下面的表达式表示大气压与海拔高度之间关系 [1]:
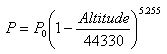
其中:
P0 是标准大气压,等于1013.25 mbar;
Altitude是以米为单位的海拔高度。
P是在某一高度的以mbar为单位的气压
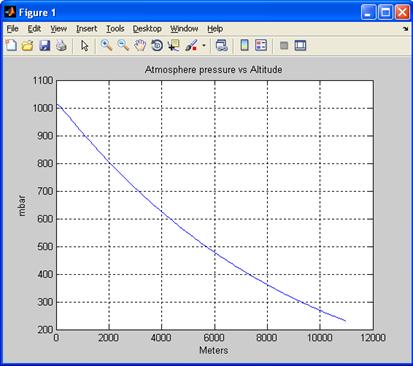
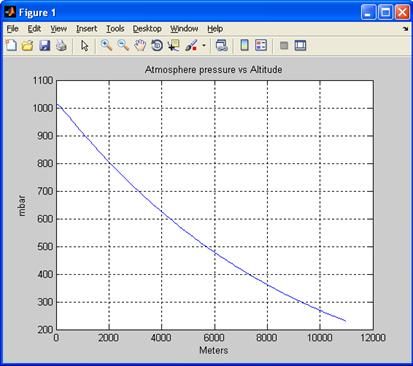
图1根据上面的公式描述了大气压变化与海拔高度的关系。
如图1所示,当高度从海平面上升到海拔11,000米高时,大气压从1013.25 mbar降到230 mbar。我们从图中不难看出,当高度低于 1,500米时,大气压几乎呈线性降低,每100米大约降低11.2 mbar,即每10米大约降低1.1 mbar。为了取得更精确的高度测量数据,可以在目标应用中构建一个大气压高度查询表,根据压力传感器的测量结果,确定对应的海拔高度。
如果使用全量程为300 mbar到1100 mbar的绝对MEMS压力传感器,测量高度可达海拔9,165米到海平面以下698米。
图 1:
大气压与海拔高度的关系
2. 利用MEMS传感器确定楼层
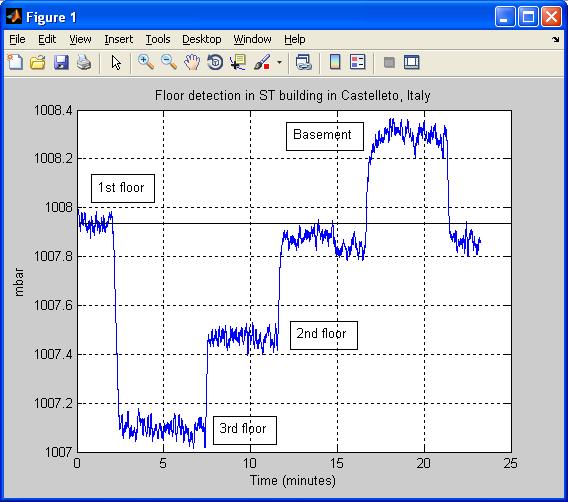
0.1 mbar rms的测量分辨率使MEMS压力传感器能够发现在1米以内高度变化。因此,在高层建筑内,可以使用压力传感器发现楼层变化。
图2所示是在意法半导体的意大利Castelletto写字楼内采集到的压力传感器数据。采样速率是7Hz,数据采集时间总计大约23分钟。从图中我们可以清晰地看到大气压在不同楼层的变化。大气压在地下室最高。随着楼层升高,大气压逐渐降低。
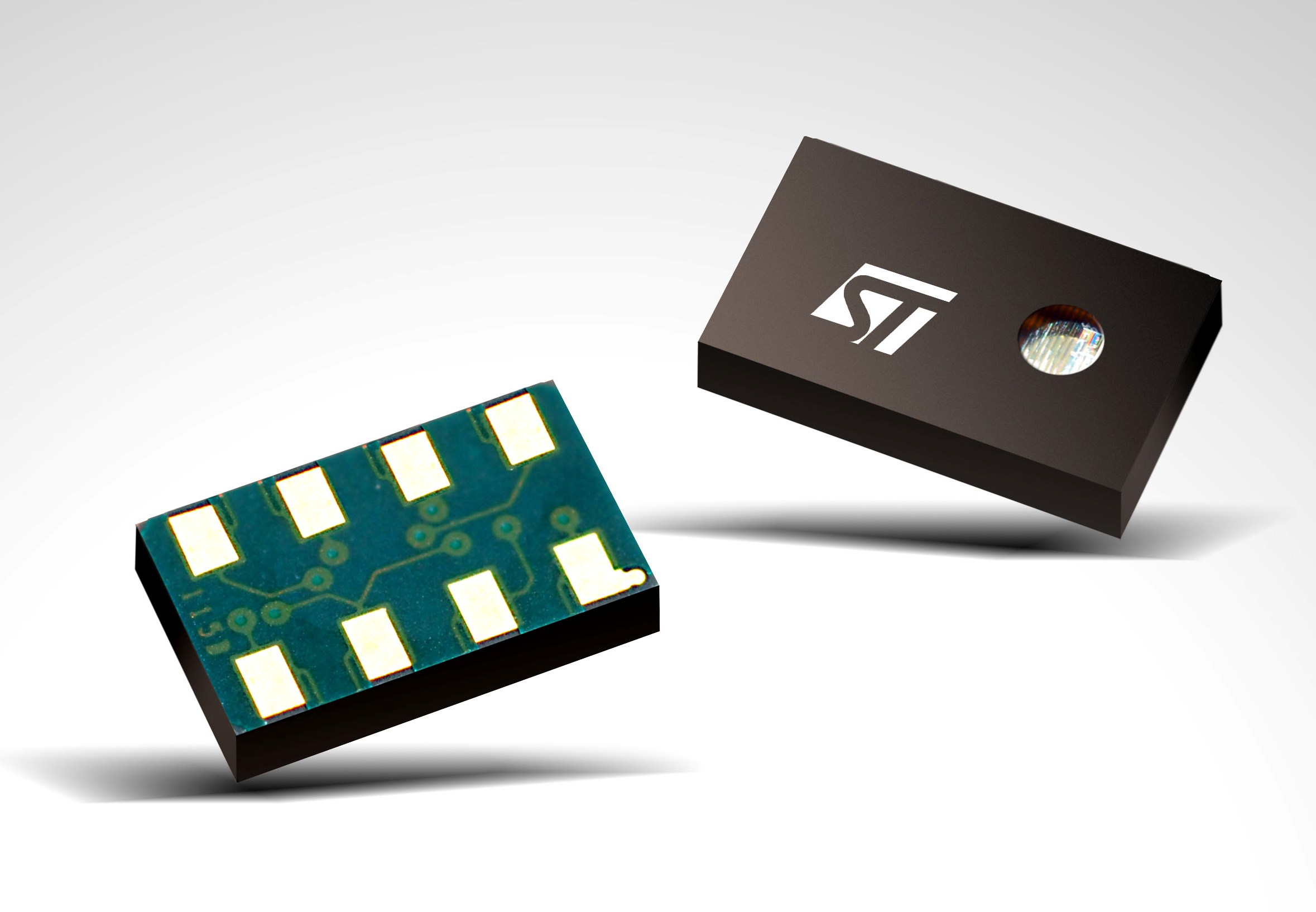
图3所示是意法半导体的一个MEMS压力传感器,这是一个采用3 x 5 x 1mm LGA-8封装的数字输出压力传感器,内置I2C/SPI接口和16位数据输出。量程是300 mbar到1100 mbar,分辨率为0.1mbar。该芯片还内置温度传感器。芯片内部控制寄存器可以指示测量结果是高于还是低于压力极限预设值。
压力传感器的测量精度会受到气流和天气条件的影响。为了取得精确、可靠的楼层测量结果,需要为压力传感器开发校准和滤波算法。
图 2:
从意法半导体传感器原始数据取得的楼层检测结果
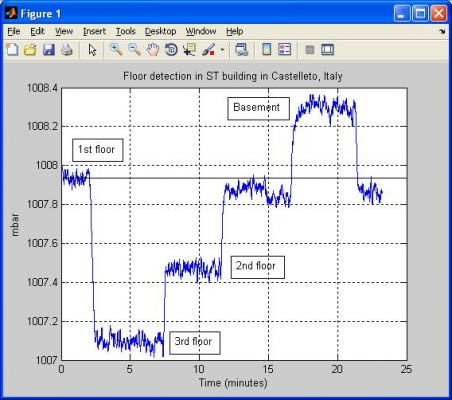
图 3:
意法半导体的MEMS压力传感器
3. 在个人导航仪中使用MEMS压力传感器
在当前市面上销售的智能手机中,大多数都内置了GPS接收器和低成本的MEMS运动传感器,例如,加速度计、陀螺仪和/或磁力计。在没有GPS卫星信号的建筑物内或GPS信号很弱的高楼林立的大都市内,个人导航或航位推测对于导航变得非常重要。鉴于GPS接收器在户内户外测量高度都不够精确,在智能手机内集成压力传感器可以辅助GPS测量高度。
个人导航系统(PNS)与个人航位推测(PDR)系统相似。从基本原理看,当无法获得GPS卫星信号时,PNS或PDR可以在智能手机的电子地图上继续提供方位和前进信息,引导用户到达兴趣点,获得位置关联服务(LBS)。
前进信息可以来自磁力计或陀螺仪或两者的模组。PNS是利用惯性导航原理(INS)对加速度计的测量值进行双重积分求解决方位信息,而PDR是计步器和步长估算器根据典型计步器原理计算加速度计提供的测量数据而获得的方位信息。在一定时间内获得前进方向和行进路程的信息后,导航系统在智能手机的电子地图上更新行人在户内的方位。
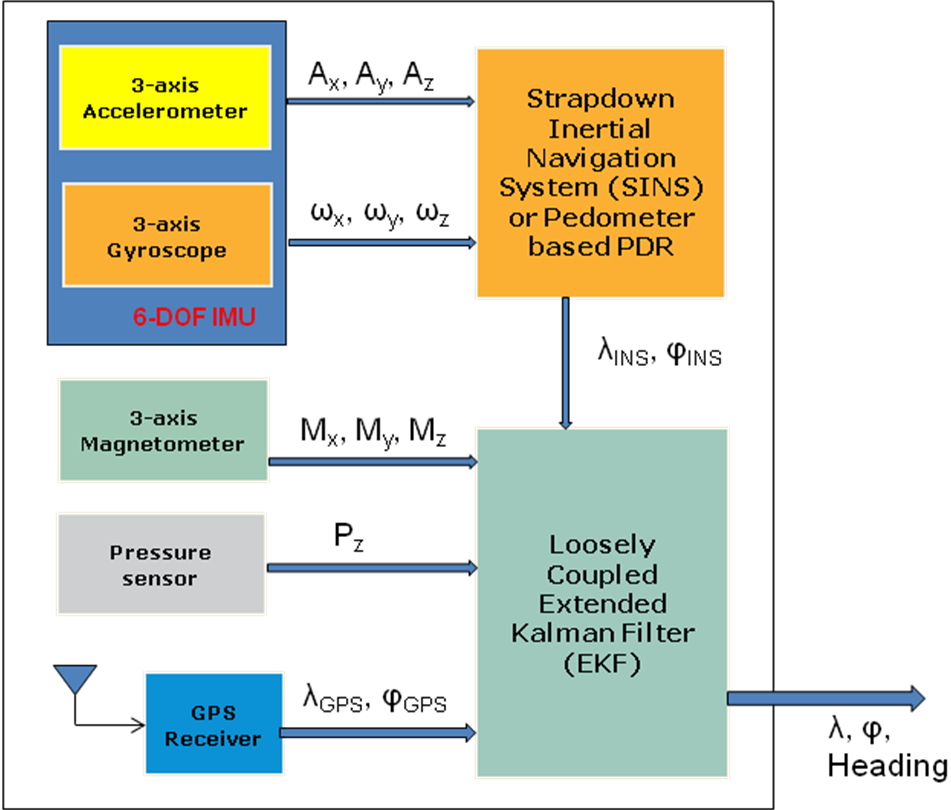
3.1 PNS或 PDR结构示意图
图4所示是PNS或PDR的结构示意图。从传感器角度看,该系统包括一个3轴加速度计、一个3轴陀螺仪、一个3轴磁力计和一个压力传感器。此外,在这个示意图内还有一个GPS接收器和一个主处理器。主处理器用于采集传感器数据,运行航位推测算法和卡尔曼滤波算法。
图 4:
PNS或 PDR结构示意图
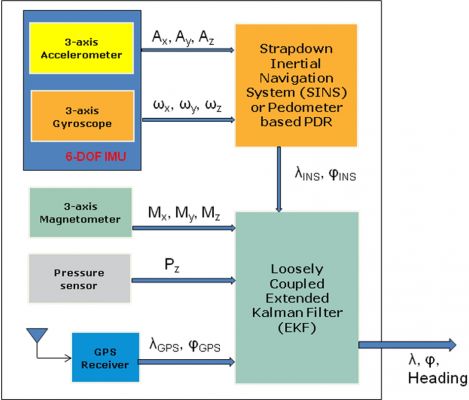
图4中每个组件的优缺点归纳如下:
- GPS接收器:
o优点:GPS可以提供进入建筑物前的初始方位;检索地球偏转角信息,根据地理前进方向修正磁力计前进方向;当GPS信号增强时校准计数器步长;分别向惯性导航系统的松耦合和紧耦合卡尔曼滤波算法提供有界的精确方位信息(经纬度)输出和伪距原始测量输出。
o
缺点:当行人保持静止时,GPS无法确定前进方向;无法检测高度(海拔高度)的细微变化。 - 加速度计:
o优点:在静态或慢速运动状态下可用于倾斜度修正型数字罗盘;在线性加速度状态下可用于计步器的检测功能;用于检测步行人当前的状态是静止还是运动。
o缺点:当智能手机旋转时,无法从地球重力组分中区别真正的线性加速度;对震动和振荡过于敏感 - 陀螺仪:
o优点:能够向惯性导航系统连续提供旋转矩阵;当磁力计受到干扰时,辅助数字罗盘计算前进方向信息
o缺点:长时间的零偏漂移导致无限的INS定位错误。 - 磁力计:
o优点:能够根据地磁北极计算精确的前进方向;能够用于校准陀螺仪的灵敏度。
o缺点:容易受到环境磁场干扰 - 压力传感器:
o优点:在室内导航应用中可区分楼层;当GPS卫星信号较弱时,可辅助GPS计算高度,提高定位精确度;
o缺点:容易受到气流和天气状况的影响。
|
|