首页
|
新闻
|
新品
|
文库
|
方案
|
视频
|
下载
|
商城
|
开发板
|
数据中心
|
座谈新版
|
培训
|
工具
|
博客
|
论坛
|
百科
|
GEC
|
活动
|
主题月
|
电子展
注册
登录
论坛
博客
搜索
帮助
导航
默认风格
uchome
discuz6
GreenM
»
测试测量
» 基于LabVIEW和PXI平台的6-DOF并联机器人控制系统的开发
返回列表
回复
发帖
发新话题
发布投票
发布悬赏
发布辩论
发布活动
发布视频
发布商品
基于LabVIEW和PXI平台的6-DOF并联机器人控制系统的开发
发短消息
加为好友
Bazinga
当前离线
UID
1023230
帖子
5213
精华
0
积分
2607
阅读权限
70
在线时间
158 小时
注册时间
2013-12-20
最后登录
2015-10-22
金牌会员
UID
1023230
1
#
打印
字体大小:
t
T
Bazinga
发表于 2015-5-12 19:53
|
只看该作者
基于LabVIEW和PXI平台的6-DOF并联机器人控制系统的开发
控制系统
,
软件开发
,
数字控制
,
机器人
,
实验室
介绍:
并联机器人以其刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好等优点,不仅仅是当前机器人研究领域的热点,而且正逐渐走出实验室被工业界所认可。稳定、快速、准确的开放式数字控制系统是制约并联机器人发展的瓶颈之一。其中实时性较强的多轴运动控制卡和功能完善的软件开发平台为其技术关键,应用NI公司的一系列软硬件产品不仅能够实现机器人的精确多轴运动控制,而且节约了开发周期、降低了系统成本、易于维护升级,特别是虚拟仪器技术的应用,使得系统能够有一个非常友好的人机交流界面。这些优点为多自由度并联机器人走向市场提供了保证。
本方案中,以LabVIEW为软件平台,以嵌入多轴运动控制卡(PXI-7356)的PXI开发平台为硬件基础,充分利用各种软件模块和工具包,快速开发了满足六维运动的6-DOF(Degree of Freedom)并联机器人控制系统。在本控制系统的开发和研制过程中实现了多电机同步、多轴协调轨迹控制、轨迹曲线实时显示与选择、面板的动态载入与重构、信息的调用与共享等功能。实验结果证明,应用NI公司系列产品不仅能够快速地开发出并联机器人的控制系统,提高系统的性价比;而且能得到比较完美的系统特性,如:25KHz—25.6MHz的编码器反馈信号滤波范围使得系统能够在强电干扰的工业现场的稳定工作,6轴PID控制周期可以达到250μs使得实时性远远高于一般控制控制系统1ms的要求,机器人六轴协调运动后的末端执行器稳态误差可达1μm体现了系统精确的特性。
研究背景:
并联机器人以其卓越的性能正在走出实验室,步入工业界和人们最为熟悉的日常生活中。早在1962年Gough and Whitehall就把并联机器人作为轮胎检测机。最近几十年中,并联机器人被用于飞行器模拟器、微操作机器人、手术机器人以及大型射电望远镜中的例子举不胜举。然而,此类并联机器人大多存在开发周期长、系统不开放维护和升级困难、造价高昂以及系统特性不完善等缺点,这也是制约并联机器人全面走向市场的瓶颈。如何在较短的时间内开发出系统特性好、成本低、功能齐全、界面友好的多自由度并联机器人控制系统是一项挑战性的工作。
本文以6- PPPS并联机器人为控制对象,以NI公司的系列软硬件产品为基础,依托国家自然基金(No. 30770538)的支持,快速开发了此并联机器人的开放式数字控制系统。
系统总体的设计
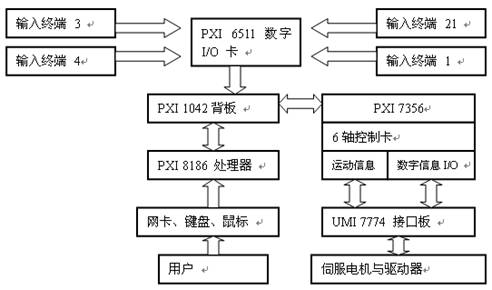
本课题所研究的并联机器人的驱动由六个高精度的伺服电机及其驱动器承担,每一轴上都设有前限位、后限位及原点三个开关,共18个I/O量。电机驱动需要进行以位置反解为基础的轨迹规划,使机器人的末端执行器以一定的轨迹准确到达预定位置,并根据预先规划的轨迹进行工作,因此,并联机器人的轨迹规划和反解运算需要一个性能强大的计算器进行计算和存储,并且这些存储的数据实时地传送到作为下位机的控制卡和驱动器上,以产生用于驱动电机的电流或电压。考虑到系统需要大量的数据传递、精确同步以及I/O信号种类多的特点,我们首先选择了PXI开发平台,这是因为PXI不仅具有业内最高的总线带宽和最低的传输延迟,而且提供从DC到6.6 GHz RF的各种模块化的I/O。为了适应本系统进一步升级和后续模块的嵌入,我们选择了高性能的8槽机箱。控制器则采用内嵌2.2GHz Intel 奔腾4处理器的PXI-8186以满足机器人轨迹规划反解和数据分析的快速性。PXI-6511工业数字I/O接口板作为外围模块提供多达64路的隔离数字输入。至于机器人控制系统的软硬件具体设计和选型,我们将分别在下面逐一介绍。控制系统硬件之间的关系如图1.
控制系统硬件设计
由于本并联机器人作为染色体切割装备系统的宏动子系统,肩负着除染色体最终切割以外的绝大部分任务,具有高的定位精度和大的工作空间要求。其基本机构是一6-PPPS解耦的空间六自由度并联机构,由六个高精度伺服电机驱动实现空间六维运动(X、Y、Z三个方向的移动和绕X、 Y、Z三个方向的转动),因为末端平台要达到微米级精度和六个电机的协调控制,所以我们选用了NI公司性能卓越的PXI-7356多轴运动控制卡。此多轴运动控制卡的缓存断点技术有效的提高了积分速度,对于一般的位置断点能够以2kHz的速率计算触发点,对于等距分布点则能够以高达4MHz的速率计算;此卡的两轴PID控制周期可以达到62.5μs,8轴PID控制周期可以达到250μs,实时性远远高于一般试验控制1ms的要求,如此高的计算效率适应了本系统的快速响应的特性。PXI-7356多轴运动控制卡的多轴同步时间小于一个采样周期;其位置精度较高,位置反馈时位置误差不超过正负一个正交码盘计数(quadrature count),模拟量反馈时应用其内置的8路16位模拟量输入采集功能,极大的提高了模数转换的分辨率,使其位置误差不超过一个最低有效位(LSB),如此高的精度为系统高精度的要求提供了很好的保障。另外,PXI-7356多轴运动控制卡自身的安全标准、S曲线调节功能、双PID控制环以及多轴之间的电子齿轮配合能够为系统提供可靠的稳定性。PXI-7356多轴运动控制卡及其配套的运动控制接口UMI-7774端口板具有用来控制固态继电器和读取数字编/译码器的64位数字I/O,使得系统中诸如18路限位、12路使能及众多的报警等信号读取和输出更为方便快捷。鉴于以上考虑,我们认为NI公司的 PXI-7356多轴运动控制卡及其配套模块式适合本系统的要求,并选用。
控制系统软件设计
控制系统的复杂性使得软件设计的过程中必须进行合理有效的层面和模块划分。结合控制系统硬件和所要呈现的功能,本软件划分为应用软件层、核心软件层和驱动软件层,每层根据功能要求又分为若干功能模块。如图2.
应用软件层:考虑到系统操作过程中需要运用一些开关来控制电机或抱闸、一些接口来改变各电机或压电陶瓷的运行参数、一些指示灯来发出正常或报警信号、一些轨迹曲线来实时监控各部分的运行情况以及各界面之间的切换等功能,我们选用了最能体现虚拟仪器技术价值的LabVIEW图形化编程语言,编写了友好、方便、灵活的人机界面。程序的整体采用了主/从结构的编程方式,主要是为了解决多个不同频率的循环和循环之间的信息交互。程序中嵌入了并联机器人的反解模型及控制算法,采用全局变量、局部变量、共享变量等实现各程序模块之间及模块内部的信息交互,充分利用用户事件技术、通知或队列技术实现各界面之间的切换,为了避免诸如两个循环同时操作一个对象之类的竞争问题,采用了同步技术。因为程序比较大,所要反映的信息多,因此在程序的管理上,我们也充分利用了LabVIEW的高级编程技巧,如为了节省内存和清晰化程序框架及前面板,我们采用了动态 VI控制技术,不但实现了子VI的即用即调,而且实现了多面板程序设计的动态载入和界面重用。
核心软件层:面向机器人的轨迹控制与I/O 逻辑控制的程序集合,如回零点、连续运行、单轴调整、轨迹曲线选择、系统自检等。该层软件一方面负责完成机器人各关节驱动电机的精确同步运动控制,实现末端执行器在操作空间中的精确轨迹;另一方面,该层软件还需要完成一组通用I/O的输入输出控制,实现对机构运动的过程控制以及对外围设备的协调控制等,以适应复杂的控制任务需要。
驱动软件层:驱动软件是实现单轴与多轴运动控制、D/A转换和硬件I/O控制的函数集合,包括轴配置、运动类型设置、电机运行和停止等操作函数。该层软件主要进行运动轴参数设置、电机加减速控制、起停控制、D/A转换和运动I/O的设置与控制等。该层的函数主要是控制板卡所带有的底层功能模块,可以用这些函数很方便的根据自己设定的控制方案编程实现上一级的核心控制软件层。LabVIEW 图形化语言和LabVIEW RT、Control Design and Simulation Bundle、Labview System identification toolkit, motion assistant等相关的NI工具包开发应用程序不但使得软件程序的开发效率大大提高,而且使得软件的功能齐全、人机界面友好。
系统整体特性与实验
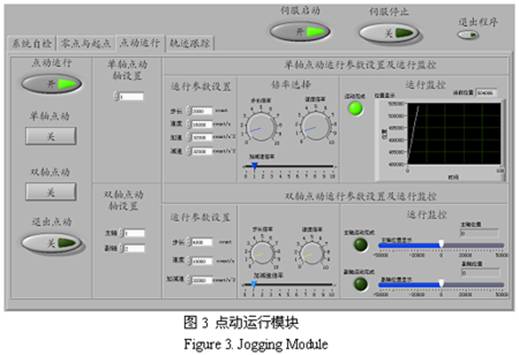
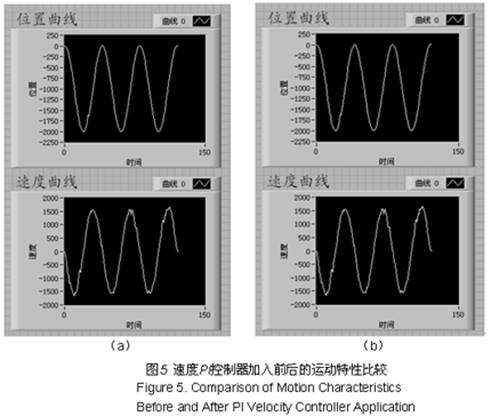
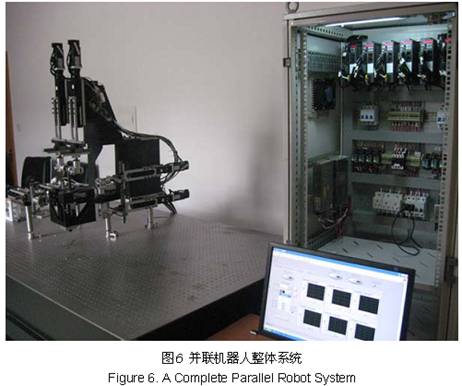
本方案是并联机器人控制系统设计领域中一种新型的系统组建方法,其出发点和落脚点是缩短开发周期、降低系统造价、提高系统特性、完善系统功能。基于LabVIEW和PXI平台的6-DOF并联机器人开放式数字控制系统不需要从最低层进行开发,只需对各个模块进行配置并编写出用户需要的特定功能程序即可,与以往的机器人控制系统的开发相比,不仅大大缩短了开发周期,而且系统的升级和维护也非常方便,在这个意义上来说此系统是性价比最高的。系统特性方面的优势主要体现在稳定性、快速性和精确性上,25KHz—25.6MHz的编码器反馈信号滤波范围使得系统能够在强电干扰的工业现场的稳定工作,6轴PID控制周期可以达到250μs使得实时性远远高于一般控制控制系统1ms的要求,机器人六轴协调运动后的末端执行器稳态误差可达 1μm体现了系统精确的特性。下图列出了几个典型的模块说明了系统的一些技术特点和成熟的功能。图3是点动运行模块,该模块不仅具有6个轴中每轴的单轴点动,而且根据机器人的构型特点和运动需求设置了任何两轴的双轴点动;该模块可以根据用户不同的运动需求设置点动步长、速度、加减速的基数值及其倍率;该模块能够实时显示运动的位置和运动完成状态,图示显示了轴1经过几个单轴点动完成后的状态。图4为轨迹跟踪模块,该模块不仅设置了预定轨迹的跟踪也具有轨迹规划的功能,并且能够同时显示六个轴的运行情况,图示为反映x向两轴同步运行的状态。图5为速度PID控制器加入前后同一余弦波的位置曲线运动所表现出的不同速度曲线特性,可见双PID控制器能够很大程度上改善其运动特性。图6为并联机器人整体系统。限于篇幅,此用于染色体切割装置的宏动并联机器人数控系统的其他特性不再一一赘述。
总结
本文课题内容涉及虚拟仪器技术、运动控制技术、机器人技术以及诸多LabVIEW编程技巧,建立并完善了基于LabVIEW和PXI开发平台的“六自由度并联机器人控制系统”,本系统具有高可靠性、高精度、高运算速度、高智能化、友好的人机交互能力等特点。独立开展了一系列运动控制研究与应用软件编制工作,本系统主要特点如下:
(1)将虚拟仪器拓展到并联机器人的自动控制领域,充分利用LabVIEW 图形化语言和LabVIEW RT, control design and Simulation Bundle、LabVIEW System identification Toolkit、Motion Assistant等相关的NI工具包开发应用程序,构成了一种基于模型的开放式运动控制系统,不但使系统具有极好的人机交互性、直观性和齐全的功能,而且缩短了开发周期,降低了开发成本和硬件成本,为机器人走向社会奠定了基础。
(2)充分利用PXI-7356多轴运动控制卡的相关软件函数和模块,开发了高精度的并联机器人的多电机协调控制和双电机同步控制。
(3)采用了用户事件技术、通知或队列技术LabVIEW的高级编程技术,解决了各用户界面和各模块之间的实时切换;采用各种变量实现不同模块之间和相同模块内部的信息传递和共享;采用了VI的动态载入技术,实现了子VI的即调即用和多面板的动态载入及界面重用。
(4)充分利用LabVIEW强大的外部接口能力,实现了动态链接库(DLL)和Windows API的调用,并嵌入了Matlab并联机器人运动控制程序,使程序不但具有Windows系统的拷贝、打印等功能,也使得复杂的计算更为快捷。
收藏
分享
评分
the king of nerds
回复
引用
订阅
TOP
返回列表
FPGA/CPLD可编程逻辑
嵌入式技术
DSP技术
X86
电商论坛
Pine A64
资料下载
方案分享
FAQ
行业应用
消费电子
便携式设备
医疗电子
汽车电子
工业控制
热门技术
智能可穿戴
3D打印
智能家居
综合设计
示波器技术
存储器
电子制造
计算机和外设
软件开发
分立器件
传感器技术
无源元件
资料共享
PCB综合技术
综合技术交流
EDA
MCU 单片机技术
ST MCU
Freescale MCU
NXP MCU
新唐 MCU
MIPS
X86
ARM
PowerPC
DSP技术
嵌入式技术
FPGA/CPLD可编程逻辑
模拟电路
数字电路
富士通半导体FRAM 铁电存储器“免费样片”使用心得
电源与功率管理
LED技术
测试测量
通信技术
3G
无线技术
微波在线
综合交流区
职场驿站
活动专区
在线座谈交流区
紧缺人才培训课程交流区
意见和建议