首页
|
新闻
|
新品
|
文库
|
方案
|
视频
|
下载
|
商城
|
开发板
|
数据中心
|
座谈新版
|
培训
|
工具
|
博客
|
论坛
|
百科
|
GEC
|
活动
|
主题月
|
电子展
注册
登录
论坛
博客
搜索
帮助
导航
默认风格
uchome
discuz6
GreenM
»
FPGA/CPLD可编程逻辑
» CPLD应用航空1l5V/400Hz高频链逆变电源之二
返回列表
回复
发帖
发新话题
发布投票
发布悬赏
发布辩论
发布活动
发布视频
发布商品
CPLD应用航空1l5V/400Hz高频链逆变电源之二
发短消息
加为好友
pengpengpang
(pengpengpang)
当前离线
UID
1023229
帖子
6106
精华
0
积分
3055
阅读权限
90
来自
中国
在线时间
156 小时
注册时间
2013-12-20
最后登录
2016-7-3
论坛元老
UID
1023229
来自
中国
1
#
打印
字体大小:
t
T
pengpengpang
发表于 2015-8-21 21:46
|
只看该作者
CPLD应用航空1l5V/400Hz高频链逆变电源之二
逆变电源
,
高电平
,
高频
,
开关
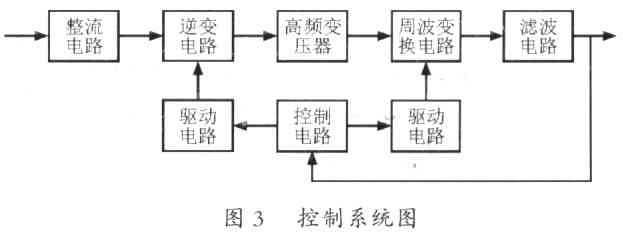
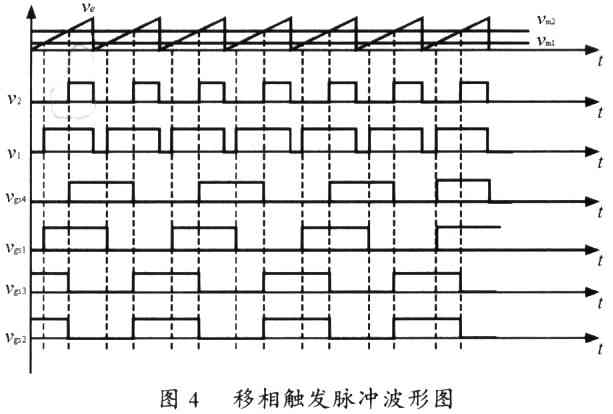
系统整体电路框图如图3所示,控制电路包括DSP和CPLD两部分,输出电压反馈给控制电路,控制电路根据给定输入,相应调整前端逆变电路和后端周波变换电路的触发脉冲。逆变的移相控制电路的实现方法相对简单,图4是移相控制电路的实现方法,其中Ve为锯齿波载波信号,Vml和Vm2为调制信号。当载波信号高于调制信号时,输出高电平;当载波信号低于调制信号时,输出低电平。由于移相控制的开关频率固定,且输出信号占空比为50%,因此将V1-和V2信号的上升沿作为触发信号,进行二分频,则可以获得开关管S1和S4的驱动信号vgs1和vgs4,通过互补关系可以获得S2和S3的驱动信号vgs2和vgs3。本部分的功能通过CPLD来实现,由Verliog编程获得。
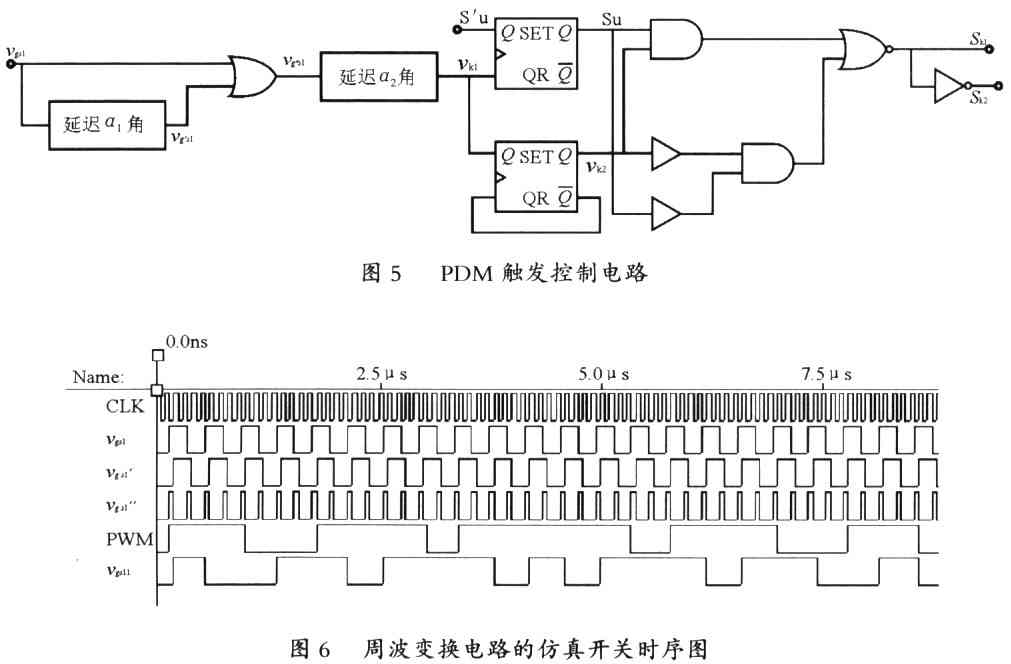
在电压型高频逆变电路中,周波变换器的换流问题成为研究的难点和关键。原因是如果强行关断功率管以实现换流,会在滤波电感中产生反向电动势。周波变换器电路PDM控制方式触发脉冲的产生是研究的重点。用传统的方法实现同步较困难,一般采用CPLD进行同步设计,其中的数字电路可以确保实现精确的同步控制。其控制逻辑框图如图5所示。图中同步信号由移相控制信号开环合成,vgs1表示超前桥臂S1开关的控制信号,延迟a1角,进行异或是为了得到与S1同步的二倍频信号S1,″,再延迟a2角获得Vk1,它作为D触发器的时钟信号,将常规SPWM波转化为软化PWM波,Vk1二分频获得vgs1信号,它决定了双向开关切换时刻。
4 系统逻辑与时序功能验证实验
在本系统中,CPLD开发环境是MAXPLUSII,用Verliog对硬件进行编程。图6为时序仿真波形,其中CLK是CPLD系统时钟,vgs1是作为前端逆变电路和后端周波变换电路的同步信号,vgs1′是延迟a1角的信号,vgs1″是vgs1′与vgs1′异或得到的,它作为D触发器的时钟信号,PWM是软化同步后的调制信号,vgs11是S11开关管的触发脉冲。其中vgs1和vgs1″不作为输出信号要求输出,只是为仿真调试方便列出。
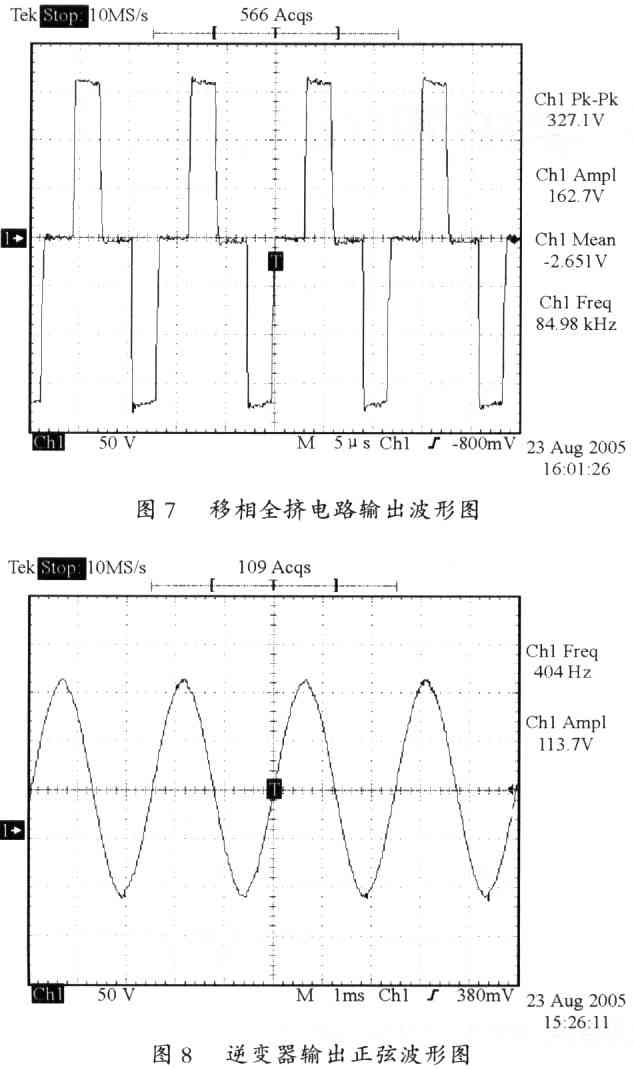
采用上述主电路结构和控制方式,研制了输出功率350W,输出频率400Hz,输出电压115V,开关频率100kHz的原理样机。图7给出的是前端移相全桥的输出波形,测试点是高频变压器的副边,波形与原理波形一致。因为高频变压器漏感的缘故,开通瞬间存在振荡电压尖峰。
图8是逆变器的输出波形,通过两级LC滤波,波形谐波畸变很小,满足指标要求。
5 结语
实现高集成度,高灵活性,具有较高的参考价值。
收藏
分享
评分
记录学习中的点点滴滴,让每一天过的更加有意义!
回复
引用
订阅
TOP
返回列表
X86
电商论坛
Pine A64
资料下载
方案分享
FAQ
行业应用
消费电子
便携式设备
医疗电子
汽车电子
工业控制
热门技术
智能可穿戴
3D打印
智能家居
综合设计
示波器技术
存储器
电子制造
计算机和外设
软件开发
分立器件
传感器技术
无源元件
资料共享
PCB综合技术
综合技术交流
EDA
MCU 单片机技术
ST MCU
Freescale MCU
NXP MCU
新唐 MCU
MIPS
X86
ARM
PowerPC
DSP技术
嵌入式技术
FPGA/CPLD可编程逻辑
模拟电路
数字电路
富士通半导体FRAM 铁电存储器“免费样片”使用心得
电源与功率管理
LED技术
测试测量
通信技术
3G
无线技术
微波在线
综合交流区
职场驿站
活动专区
在线座谈交流区
紧缺人才培训课程交流区
意见和建议