首页
|
新闻
|
新品
|
文库
|
方案
|
视频
|
下载
|
商城
|
开发板
|
数据中心
|
座谈新版
|
培训
|
工具
|
博客
|
论坛
|
百科
|
GEC
|
活动
|
主题月
|
电子展
注册
登录
论坛
博客
搜索
帮助
导航
默认风格
uchome
discuz6
GreenM
»
DSP技术
» 基于DSP的室内惯性导航系统设计
返回列表
回复
发帖
发新话题
发布投票
发布悬赏
发布辩论
发布活动
发布视频
发布商品
基于DSP的室内惯性导航系统设计
发短消息
加为好友
yuchengze
当前离线
UID
1062083
帖子
5837
精华
0
积分
2921
阅读权限
70
在线时间
222 小时
注册时间
2016-6-30
最后登录
2018-9-9
金牌会员
UID
1062083
性别
男
1
#
打印
字体大小:
t
T
yuchengze
发表于 2016-11-15 21:41
|
只看该作者
基于DSP的室内惯性导航系统设计
光电
,
信息
轮式遥控机器人已经应用在地震、火灾等一些危险的
室内
区域进行救援和探测,或执行反恐任务。由于在这些特殊的环境下存在诸多的未知因素,且室内无 GPS信号,人们不得不依靠先进的科学技术和仪器来获取遥控机器人小车的
导航
信息。但是目前轮式运动小车主要采用的导航传感方式有视觉、光电、超声、里程计等,比较容易被外界环境干扰,不能满足广大市场的需求。
但是惯性导航装备安置在运载体内,工作时不依赖外界信息,也不向外界辐射能量,不容易遭到滋扰,是一种自立式
导航系统
,优于上述的导航传感例子。 并且近年来MEMS(微机电系统)结构的惯性
传感器
随
半导体
技术的进步得到了迅速发展,使其低成本而高精度的期望得到了实现。MEMS惯性传感器组成的惯性导航装置结合轮式小车的里程计,能够产生导航和定位信息,减少对外部环境的倚赖,实现在外部环境条件(例如光照、墙壁材质)未知情况下的导航。
由于是在室内区域进行勘测搜索,小车的运行特点与一般的飞机、船、车不同,它的运动轨迹变化较快,且在运动时存在一定的振动,因此常用的卡尔曼
滤波算法
需要进一步改进才能应用。惯性
传感器采集
数据量大,且进行惯性导航时需要大量的浮点运算,因此本项目采用了具有强大
数字信号处理
功能的
DSP
28335芯片和PC控制终端,实现惯性传感器的数据采集、时序逻辑控制、与驱动系统通信和地图显示功能, 具有体积小、成本低、
功耗
低等优点。
综上所述,本文将选用低成本的MEMS器件,结合DSP和卡尔曼滤波算法,能实现较高精度的轮式小车导航和定位。
1 系统体系架构
本文的目标是研制一个轮式小车
惯性导航系统
,能够通过wifi实现PC终端和手持终端控制轮式小车行动以及小车所采集数据的传输。
搭建如下图1所示的系统,TI公司的浮点DSP TMS320F28335芯片作为主
数字信号处理器
,采集各MEMS惯性传感器的信号并处理,处理结果通过WIFI将数据输送到PC终端
C终端负责显示定位结果和地图显示,并向小车驱动系统发送控制命令,同时接收驱动系统反馈的里程计信息。
图1 总体架构
2. 硬件计划及详细实现
硬件设计
上,主要分为核心板和驱动板。核心板包括DSP最小系统,JTAG下载口设计,系统
电源
供给电路和MEMS传感器,WIFI模块等。而驱动板主要设计的内容是直流大电机的驱动模块。
2.1 核心板设计
2.1.1 电源
电路设计
TMS320F28335 工作时需要的电压不同:内核电压(1.9 V)与I/O供电电压(3.3 V),对于电源比较敏感,所以电源部分利用两路输出电源器件TPS767D318来实现,如图2所示。同时根据仿真实验和实际焊接电路的测试,
电源模块
输出端最好使用一些容值不小于10uf的保护电容,且不能使用贴片电容,否则工作不稳定。
图2 DSP
电源设计
在电源设计中,考虑到TPS767D318芯片可以产生复位信号,所以在核心板上并没有再另外为DSP设计复位电路。
2.1.2 JTAG下载口电路设计
图3为JTAG电路,按照仿真器的通信引脚选择14脚的仿真接口,同时要注意EMU0和EMUl信号必须通过
上拉电阻
连接至电源,其中上拉电阻为10kΩ。
图3 JTAG电路设计
2.2 小车驱动板设计
在本装置中,我们采用BTS7960作为直流
电机驱动
芯片。BTS7960是集成的大电流半桥驱动,其内部包含了一片NMOS、一片PMOS和一片半桥门集驱动,在IOUT = 9 A,VS= 13.5V,Tj = 25 °C 时,其内
阻抗
为17mΩ。装置采用了两个直流大电机,如图4所示为驱动单个电机前后转向的电路图。
图4 驱动模块电路设计
在电机驱动这里,需要注意一个细节,就是电机在转动过程中有可能会产生反向的电动势,使电流一瞬间过大,导致
单片机
复位甚至有可能烧坏芯片。因此在设计过程中,可以考虑在单片机PWM输入到电机驱动接口的地方添加
光耦
器件隔离或者二极管。如图5所示,驱动板选择了tlp521-4这种光耦器件设计隔离电路,减小电压的干扰,减化电路的设计,同时也把四路PWM的I/O电平从3.3上拉到5V。
图5 TLP521隔离电路
3.软件设计及具体实现
在软件程序设计上,主要应用九自由度惯性导航传感器(ITG3200+ADXL345+HMC5883L ),结合DSP和卡尔曼滤波算法,能实现较高精度的轮式小车导航和定位。
3.1传感器器件程序设计
九自由度惯性导航传感器在许多领域都得到了实际的应用,如无人机,救灾机器人等。它包括ITG3200三轴陀螺仪,HMC5883L三轴磁感应传感器和ADXL345三轴加速度传感器,所以可以得到加速度,角速度以及角度实时的数值。
ITG3200是MEMS三轴陀螺仪,可以测量小车的旋转角速度,同时也可以通过积分把角速度转换为小车的倾角。程序中,ITG3200的初始化如下:
unsigned char Init_ITG3200(void)
{
unsigned char Return1,Return2,Return3,Return4;
unsigned char Data;
Data = 0x00;
Return1 = IIC_WriteData(0xD0, 0x3E, &Data, 1);
Data = 0x07;
Return2 = IIC_WriteData(0xD0, 0x15, &Data, 1);
Data = 0x1E;
Return3 = IIC_WriteData(0xD0, 0x16, &Data, 1);
Data = 0x00;
Return4 = IIC_WriteData(0xD0, 0x17, &Data, 1);
if(Return1 && Return2 && Return3 && Return4)
return 1;
else
return 0;
}
其具体功能实现可以在主程序中通过SCI读取其值。所读取的值为角速度,不会受到小车运动的影响,因此该信号噪声很小,同时可以由它积分得到小车倾斜角度,可以平滑信号使其更加稳定。
由于装置是要在不同的室内区域进行勘测搜索,再加上未知的环境,所以角速度信号可能存在一定的偏差,会导致积分后的角度出现大的误差,无法得到实际的数值。为了消除这个由于偏差而产生的累积误差,装置上加上ADXL345三轴加速度传感器对于获得的角度信息进行校正。ADXL345初始化如下:
unsigned char Init_ADXL345(void)
{
unsigned char Return1,Return2,Return3,Return4;
unsigned char Data;
Data = 0x0b;
byReturn1 = IIC_WriteData(0xA6, 0x31, &Data, 1);
Data = 0x08;
Return2 = IIC_WriteData(0xA6, 0x2c, &Data, 1);
Data = 0x08;
Return3 = IIC_WriteData(0xA6, 0x2d, &Data, 1);
Data = 0x80;
Return4 = IIC_WriteData(0xA6, 0x2e, &Data, 1);
Data = 0x00;
Return4 = IIC_WriteData(0xA6, 0x1e, &Data, 1);
Data = 0x00;
Return4 = IIC_WriteData(0xA6, 0x1f, &Data, 1);
Data = 0x05;
Return4 = IIC_WriteData(0xA6, 0x20, &Data, 1);
if(Return1&&Return2&&Return3&&Return4)
return 1;
else
return 0;
}
通过ADXL345所得到的角度,和陀螺仪积分后的角度进行对比,然后使用它们的偏差改变陀螺仪的输出,从而积分后的角度慢慢校正到实际的角度,如图5所示。
图5 通过加速度传感器校正角度
HMC5883L三轴磁感应传感器的作用相当于罗盘,在水平情况下,无需借助其他传感器便可以计算出航向。其初始化如下:
unsigned char Init_HMC5883(void)
{
unsigned char Return1;
unsigned char Data;
// Bit4 Bit3 等于11时,选择2000度/秒的量程
Data = 0x00;
Return1 = IIC_WriteData(0x3C, 0x02, &Data, 1);
if(Return1)
return 1;
else
return 0;
}
收藏
分享
评分
回复
引用
订阅
TOP
返回列表
测试测量
PowerPC
电商论坛
Pine A64
资料下载
方案分享
FAQ
行业应用
消费电子
便携式设备
医疗电子
汽车电子
工业控制
热门技术
智能可穿戴
3D打印
智能家居
综合设计
示波器技术
存储器
电子制造
计算机和外设
软件开发
分立器件
传感器技术
无源元件
资料共享
PCB综合技术
综合技术交流
EDA
MCU 单片机技术
ST MCU
Freescale MCU
NXP MCU
新唐 MCU
MIPS
X86
ARM
PowerPC
DSP技术
嵌入式技术
FPGA/CPLD可编程逻辑
模拟电路
数字电路
富士通半导体FRAM 铁电存储器“免费样片”使用心得
电源与功率管理
LED技术
测试测量
通信技术
3G
无线技术
微波在线
综合交流区
职场驿站
活动专区
在线座谈交流区
紧缺人才培训课程交流区
意见和建议






 C终端负责显示定位结果和地图显示,并向小车驱动系统发送控制命令,同时接收驱动系统反馈的里程计信息。
C终端负责显示定位结果和地图显示,并向小车驱动系统发送控制命令,同时接收驱动系统反馈的里程计信息。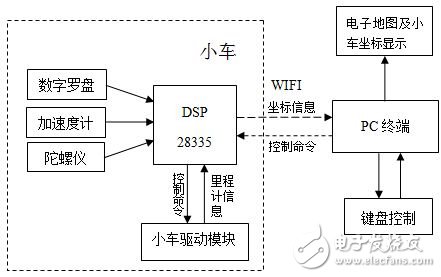 图1 总体架构
图1 总体架构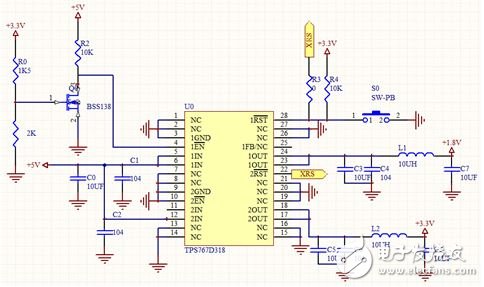 图2 DSP
图2 DSP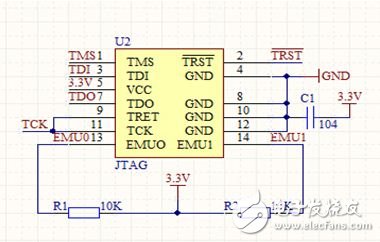 图3 JTAG电路设计
图3 JTAG电路设计 图4 驱动模块电路设计
图4 驱动模块电路设计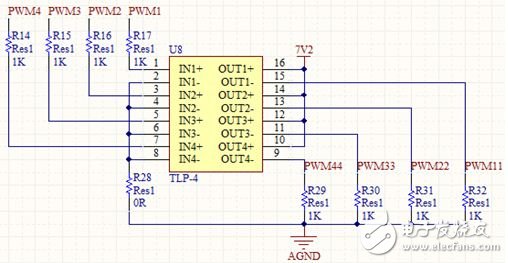 图5 TLP521隔离电路
图5 TLP521隔离电路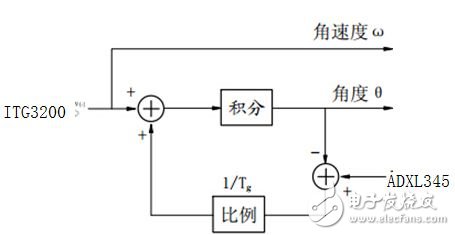 图5 通过加速度传感器校正角度
图5 通过加速度传感器校正角度