|

- UID
- 863084
|
总部设在瑞典查尔姆斯理工大学的研究人员已经开发出世界第一个使用意念控制的植入式医疗机器人手臂。该机器人手臂使用截肢者的神经和剩余的肌肉承担传导功能,初步的临床使用将在稍后首先在北半球进行。20世纪60年代以来的截肢者通常使用的是电脉冲方法来控制他们的行动,但是由于电脉冲方法的种种限制,假肢安装者会觉得身体上的不适合以及操作上的难以控制,因此大多数的截肢者最终放弃了选择安装假肢。
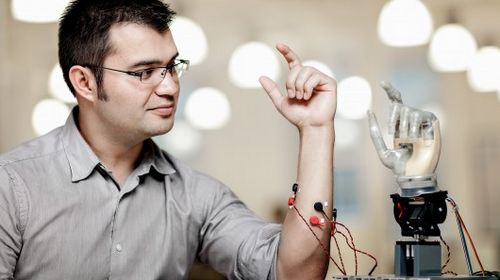
瑞典查尔姆斯理工大学的研究人员热衷于假肢的研究工作,在研究过程中,他们发现了一种名叫“骨整合”的技术,这种技术最初的应用是在1960年,而最早的应用范围也仅限于耳朵,眼睛,鼻子这些较小的假体上。
研究人员表示“骨整合”的技术是意念控制假肢的关键。这项技术将钛合金的假肢植入患者骨架的同时,假体直接连接到病患的肌肉神经以获得永久的生物电极,这种方式与之前典型的假肢控制方式相比的优势在于,这提供了一个更加稳定的生物脉冲信号。
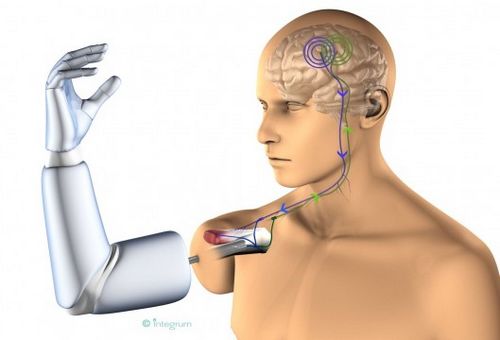
患者脑电波意念脑电波脉冲被被捕获后,首先被转移到神经系统的接口,最后,通过复杂的算法将脉冲解码于人工手臂,以帮助患者很好地控制动作。 |
|



