中国电子科技集团第38研究所 张宏财目前输油管道泄漏监测定位的主要方法可分为两大类,一类是检测输油管线的管壁状况,如管内探测球等,另一类则依赖于监测输油管内流体的状态,如压力、流量的变化,常用的方法有压力梯度法、负压力波法、流量平衡法、相关法等。随着计算机、通信和仪表技术的快速发展,监测输油管道内流体的状态变得越来越容易实现,逐渐成为输油管道监测的主流方法。由于这些依赖监测输油管内流体的状态的方法各有其优缺点,所以目前输油管道的泄漏监测往往是采用多种方法联合判断。近几年来,随着高性能、低功耗处理器ARM的出现,信号采集存储系统的功耗和体积不断减少,满足了便携式的要求,使得掌上仪器的开发成为可能。本文利用ARM核微处理器LPC2214研制的相关检漏仪,采用了负压波法和声波法判断相结合的方法,依据相关函数检测原理,它不仅可以用于石油检漏,也可以用于煤气、城市自来水、天然气等管道的泄漏检测。
相关检漏原理 1 负压波检测 当泄漏发生时,泄漏处因流体物质损失而引起局部流体密度减小,产生瞬时压力降低和速度差,当以泄漏前的压力作为参考标准时,泄漏时产生的减压波就称为负压波。该波以一定速度自泄漏点向两端传播,经过若干时间后分别传到上下游。上下游压力传感器捕捉到特定的瞬态压力降的波形就可以进行泄漏判断,根据上下游压力传感器接收到此压力信号的时间差和负压波的传播速度就可以定出泄漏点。
负压波法检测泄漏依赖泄漏点产生突然的压力降,通常大的管道泄漏都具有这一特征,然而对于缓慢发生的泄漏或已经发生的泄漏,负压波法一般不能检测出,这是其局限性。
2 声波检测 当管道内液体泄漏时,由于管道内外的压力差,使得泄漏的流体在通过泄漏点到达管道外部时形成涡流,这个涡流就产生了振荡变化的声波。这个声波可以传播扩散返回泄漏点并在管道内建立声场。声波法是将泄漏时产生的噪声作为信号源。声波沿管道向两端传播,通过设置好的传感器拾取该声波,经处理后确定泄漏是否发生并进行定位。可以有效的克服负压法的缺陷。
为了精确获得泄漏引发的压力波和声波传播到上下游传感器的时间差,需要准确地捕捉到泄漏压力波信号序列的对应特征点。由于现场的干扰、输油泵的振动等因素,采集到的压力波信号序列附加了大量噪声,如何从噪声中准确地提取出信号的特征点是定位的关键。本仪器采用相关函数分析法,相关函数检漏法就是利用传感器拾取漏点发出的负压波或声波,对负压波或声波信号进行互相关分析。没有泄漏时,相关函数的值在零附近;发生泄漏后,相关函数的值将发生显著变化;另外,当管道泄漏点的位置不同时,两个信号的延迟时间就有区别,信号的相关函数的值就会改变。因此,根据信号的相关函数信息,就可以对管道的泄漏状况进行检测并进行定位。
漏点定位算法
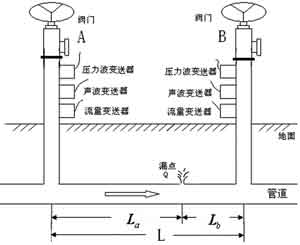
图1 相关函数检漏法的工作原理
检测时,将传感器分别置于管道部位露出的管道两端。把埋于几米深的地下管道的微弱泄漏引起的负压波信号、声波信号转换成电信号。通过电缆送到与传感器阻抗相匹配的放大器输入级,经前置放大,通过带通滤波器进行预处理,通过定义高通(或低通)频率值来限制记录噪声信号的频率范围,从而抑制干扰信号。信号经过电压放大,经数据采集板进行采样和量化,然后由ARM微处理器进行处理,得出时间差,进而计算出泄漏点。
假设管道在Q点发生泄漏,产生一个以Q点为泄漏源的负压波和声波信号,该负压波、声波信号将以一定的波速V向管道两端传播,安装在管道A、B两端的传感器分别在和(t+)到这个信号(这里假设泄漏点距离两个传感器的距离La>Lb),由于同时也有外部噪声的影响,设A、B两端的传感器测得的信号样本函数分别为A(t),B(t)因而它们可以表示为:
A(t)=f(t)+NA(t)
B(t)=f(t+τ)+NB(t)
其中,f(t)和f(t+τ)是A、B两处的源信号,NA(t)和NB(t)分别为A、B两处的背景噪声。对A(t)和B(t)进行相关运算,即:

了处理数据方便,一般认为泄漏信号与噪声信号相互独立不相关,噪声信号NA(t)和NB(t)完全不相关,则: 
当相关函数RAB(τ)达到峰值时,所对应的τ值正好与两个传感器检测到的信号的时间差相一致。由数学知识可知,相关函数R'AB(τ)=τ+τ0处取得极大值的必要条件是RAB(τ)在τ0处的导数RAB(τ)=0,由此求出τ0,再测出两个传感器之间的实际长度L和负压波、声波在该管道的传播速度V,泄漏点Q的位置就可以确定,即:
LA=(L+S×V)/2
或
LB=(L-S×V)/2
ARM检测仪的构成
本文所研制的检漏仪是基于ARM核嵌入式微处理器的新一代嵌入式系统。ARM微处理器功耗低、成本低、性能强;支持ARM/THUMB双指令集;配有丰富的标准软件开发工具和调试环境。而且ARM核也以其高性能、小体积、低功耗、紧凑代码密度和多供应源的出色结合而著名,是目前公认的最领先的32位嵌入式RISC微处理器核。系统结构如图2所示。
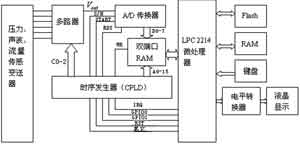
图2 ARM嵌入式系统框图
系统设计分析如下:
①数据采集由一片CPLD(复杂可编程逻辑器件)来产生控制时序,控制逻辑主要包括:多路选择地址C0~C2、采样保持S/H、启动A/D、双端口写入允许WR、写入地址以及一帧数据满后的中断请求IRQ等信号,主要时序关系如图3所示。

图3 数据采集时序图
②采用Philips公司的LPC2214的微处理器,用它来对采集到的数据进行处理、显示操作。LPC2214是基于ARM7 TDMI核的RISC微处理器,ARM7TDMI为低功耗、高性能的16/32位核,最适合对价格及功耗敏感的场合。LPC2214在ARM7TDMI核的基础上扩展了一系列通用外围器件:112个通用I/O口,4个串行口,2个32位定时器,9个外部中断,通过片内PLL可实现高达60MHz的操作频率。
③采集电路与ARMCPU用8KB双端口RAM和中断方式交换采集数据,RAM内可设两个缓冲区交替工作,双端口RAM可直接与ARM嵌入式系统的扩展总线连接。
④设计中选择TI公司的TLC5540高速模数转换芯片,其具有8位分辨率,内置采样和保持电路,该芯片采用一种改进的半闪结构、CMOS工艺制造,因而大大减少了器件中比较器的数量,而且在高速转换的同时,能够保持低功耗,转换速率可达40MB/s。
⑤由于要移植嵌入式操作系统,所以要扩展2M的Flash(SST39VF160)和8M的RAM(IS61LV25616AL),嵌入式操作系统、应用程序的代码和文件系统均存储在Flash中。
⑥采用普通I/O口来扩展外部键盘,形成4×4的矩阵键盘。分别对应“0,1,2,3,4,5,6,7,8,9”、“.”、左移、右移、前翻页、后翻页和确认键。实现对各测控模块组态信息的设置以及显示画面的切换。
⑦选用控制器为SED1335的单色STN图形液晶,其点阵为320×240,考虑到LCD控制器的工作电压为5V,而主CPU的工作电压为3.3V,因此采用74HCT164245对数据总线进行电平转换。
软件设计
1 操作系统选择
支持32位ARM CPU的嵌入式操作系统有很多,现在市场上几个著名的商业嵌入式操作系统主要有Vxwork、QNX、Windows CE等。Linux则以其免费的、源代码公开的特殊魅力,在嵌入式系统中得到广泛的应用,嵌入式Linux具有以下特点:
①Linux开放的源码,丰富的软件资源。
②功能强大的内核,性能高效、稳定,多任务易于裁减。
③完善的网络通信、图形、文件管理机制。
④支持大量的周边硬件设备。
⑤良好的开发环境,不断发展的开发工具集。
⑥价格低廉有效降低产品成本。
μClinux是一套非常优秀的嵌入式自由软件,是Linux 2.0/Linux 2.4版本的一个分支,它被设计用来应用微处理器领域。由于μClinux操作系统是源代码公开的,其硬件相关部分可以通过定义一些函数移植到不同的硬件平台,具有Linux的宿主机开发环境,有GNU的交叉编译器的支持,有操作系统的源代码,因此开发基于嵌入式系统的应用程序将非常方便。
2 软件功能设计
软件主要包括系统软件和应用软件两部分,如图4所示。
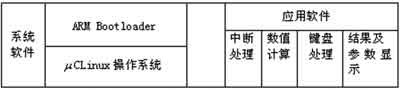
图4 系统软件结构及组成图
ARM Bootloader完成ARM的初始化、存储器的设置以及嵌入式 μcLinux的加载,最后控制权交给 μcLinux操作系统,此后系统在μcLinux的管理下运行应用程序;应用程序包括中断处理、数值计算、键盘处理、泄漏点位置及参数显示,显示软件完成320×240点阵LCD模块的驱动、汉字及图表曲线的显示等功能。由于μcLinux是多任务系统,上面几个处理任务可以设计成独立进程,程序设计变得简单。
结束语 该仪表设计主要采用了ARM微处理器、μcLinux操作系统以及数值信号处理方法,在嵌入式系统中实现了高精度的信号采集和快速的数值分析算法。该便携式泄漏检测定位仪在实际应用中取得了良好效果,可以用于煤气、城市自来水、天然气等管道的泄漏检测定位。 | 




