|

- UID
- 852722
|

在地质石油勘探、设备安装、道路桥梁建设等工程应用以及机器人控制、坦克和舰船火炮平台控制、飞机姿态控制等系统的自动 水平调节中,都需要高精度的倾角测量。但高精度的倾角,测量设备通常体积较大,成本高,使许多工程应用受到限制。本文从倾角的高精度测量出发,着重介绍了 倾角传感器输出稳定性处理、温度补偿、非线性处理(正弦曲线拟合)、信号调理及其测量电路的特殊处理等。
1 倾角测量系统的硬件设计
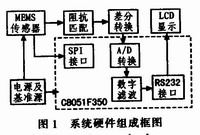
倾角测量系统硬件部分主要由MEMS传感器(含双轴倾角传感器和温度传感器)、SoC电路、数据处理及传输和其他辅助电路等模块组成。倾角测量系统的组成框图如图1所示。

1.1 MEMS倾角传感器接口
MEMS倾角传感器采用芬兰VTI Technologies公司的SCA100T系列中的SCA100T-D01,测量范围为±30°。SCA100T系列是采用微机电系统(MEMS)技 术制造的一款高分辨率双轴倾角传感器。SCA100T-D01数字输出分辨率为0.035°/LSB,模拟输 出分辨率为0.002 5°。模拟输出的分辨率大大高于数字输出的分辨率,故本设计采用其模拟输出。模拟输出将涉及较为复杂的模拟信号处理,如果模拟信号处理不当,系统的分辨率 和精度将大打折扣,有时甚至还不如数字输出。采用合理的模拟信号处理电路是保证系统精度的方法之一。
SCA100T-D01内置温度传感器,可以通过其自带的SPI数字接口读取温度值,并在处理器中进行相应的温度补偿。这是保证系统精度的又一方法。
1.2 阻抗匹配及放大
SCA100T-D01输出阻抗为10 kΩ,为保证MEMS倾角传感器SCA100T-D01输出的信号有效地传递,即要求衰减最小,设计中采用了具有高输入阻抗的场效应管型运放TL081设计了阻抗匹配电路,采用同相输入,以提高输入阻抗。
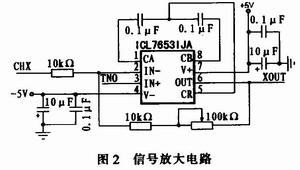
信号放大电路采用ICL7653斩波稳零运算放大器来 完成,如图2所示。ICL7653具有极低的失调电压和偏置电流,具有较高的工作稳定性和优良的高精度放大功能。ICL7653斩波稳零使用内部时钟时, 在CA、CB与CR端之间加上0.1 μF的低泄放、高稳定性的聚酯或聚丙烯电容。同时在双电源接入端进行滤波和去耦处理。

1.3 差分转换及驱动
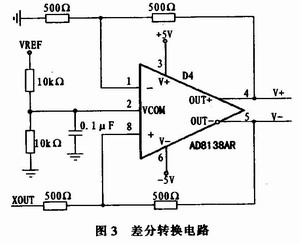
如图3所示,差分转换电路以AD8138AR为核心,将单端信号转换差分信号,既可以提高共 模抑制比,有效减小共模信号影响,又可以驱动SOC内部的24位差分Sigma-Delta模/数转换器。AD8138AR具有较宽的模拟带宽(320 MHz,-3 dB。增益为1时),而且AD8138AR为表面封装器件,器件体积小,使得ADC与信号输入点的距离可以很近,大大减少了外界噪声的影响。

1.4 SOC微控制器资源分配
本设计选用Silicon Labs公司的C8051F350作为处理核心。C8051F350是真正能独立工作的片上系统(SOC),它自带8K字节Flash存储器,可在系统编 程;集成了1个全差分24位Siva-Delta模/数转换器(ADC),该ADC具有在片校准功能,2个独立的数字抽取滤波器可被编程到1 kHz的采样率;具有2路UART和1路SPI接口。与其他类型的微控制器实现相同功能需要多个芯片的组合才能完成相比,C8051F350不仅减少了系 统成本和系统体积,而且大大提高了系统的可靠性。
设计中采用C8051F350的24位Sigma-Delta模/数转换器作系统信号的模数转换,SPI接口作MEMS倾角传感器的温度采集,以实现对传感器的温度补偿,UART作串行LED显示接口。为保证模/数转换器工作稳定,采用外部基准源。
1.5 ADC基准源及传感器电源
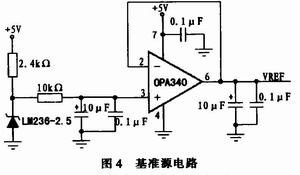
MEMS倾角传感器SCA100T在倾角为0°时,模拟输出为其电源电压的1/2倍,如果倾角传感器电源电压有波动,则其输出会产生相应的波 动。因此设计时,将给模数转换电路提供基准源的输出(如图4所示),经过提高驱动能力后,提供给MEMS倾角传感器SCA100T作电源(如图5所示)。 一方面,基准源输出纹波极小,且性能稳定;另一方面,模数转换器的基准源和MEMS倾角传感器SCA100T的电源同时向相同方向变化,抵消了MEMS倾 角传感器因电源引起零点漂移的影响。


图4中的基准源LM236输出的2.5 V电压经过轨对轨运放OPA340组成的跟随电路处理后,增大了驱动能力,既作为模数转换电路的基准源,同时还为差分转换电路提供中心电压,以及MEMS倾角传感器SCA100T的电源输入。
图5中的输入为图4中的参考电压(VREF)输出。以低漂移、高稳定性运放OPA340组成的运放电路给倾角传感器SCA100T提供电源,能保证电源纹波小,工作稳定。
2 信号的数学处理
2.1 ADC精度控制
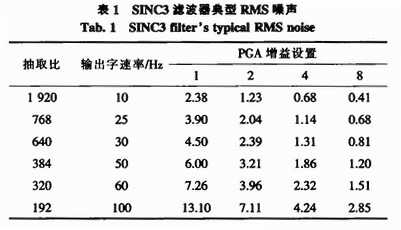
C8051F350内部有具有2个独立的抽取滤波器(SINC3滤波器和快速滤波器)和1个可编程增益放大器。根据参考文献SINC3滤波器RMS噪声小,精度高,缺点是输出速率较低,而快速滤波器则相反。本设计对速率要求低,而对精度要求高,因此选用SINC3滤波器。SINC3滤波器典型RMS噪声如表1所示。

从表1可知,较高的抽取比需要较长的转换周期,即输出字速率较低,但具有较低噪声。
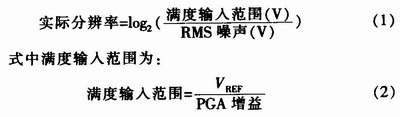
根据参考文献,采用SINC3滤波器时,该模/数转换器的实际分辨率为:

根据实际分辨率的公式(1)可知,当抽取比为1 920,输出字速率为10 Hz时,根据实际分辨率的公式(1)可得到实际分辨率约为20.00位。
SCA100T传感器的 灵敏度为70mV/(°),分辨率为0.0025°,ADC参考电压VREF为2.5V,则需要能检测的最小信号为0.0025°x70mV/°= 0.175 mV,根据0.175 mV/2.5 V="1"/14 286可知,ADC的位数至少应为14位,即214=16 384>14 286,根据减额设计要求,取20位,所以本设计完全满足设计要求。
2.2 温度补偿
根据参考文献,SCA100T-D01的温度误差曲线如图6所示。

通过曲线拟合,其曲线方程为:

在信号通过模数转换器采集后,转换为角度输出时,根据实时采集的倾角传感器SCA100T处的温度值,就可以根据温度补偿曲线补偿相应的角度值,将温度对倾角测量的影响降到最低。
2.3 曲线拟合
由于SCA100T系列传感器输出与倾斜角度存在非线性关系(非线性误差在测量范围内为0.11°),这样不利于分析处理测量结果。因此必须采取相应的线性化措施,以补偿传感器引入的非线性。传统方法中多数采用硬件方法,实现方法比较复杂,且稳定性和可靠性难以控制。
由于SCA100T系列传感器的非线性特性是已知的,则可以利用相应的校正函数进行补偿。由于微处理器具有很强的函数运算与数据处理能力,用编程的方法可以很容易实现所需的校正函数。本设计采用SOC通过软件编程的方法修正非线性。
在设计时,将SCA100T-D01传感器的测量范围进行进一步细分,如将倾角为3°的这段曲线划分为2.5°~3.5°,并将拟合曲线修改为下式:

式中,XIN为模数转换器输出值经内部SINC3滤波器滤波后得到的采样值,TER为SCA100T传感器的实时温度补偿值,PI为圆周率。
上式既修正了传感器输出的非线性,又修正了温度对传感器的影响。
3 实测数据
该倾角测量系统在MC019-JJ2数字式2"光学分度头标准仪器上进行了分度和性能测试。MC019-JJ2数字式2"光学分度头是一种对装夹在其主轴上的工件进行角度分度或进行角度检验的精密光学计量仪器,其显示当量为1"。测试数据如表2所示。

从表2的测试数据可知,每个测试点的偏差有正有负,其主要原因在于这些测试点的曲线拟合是独立的,互不影响。另外,在30°时绝对误差最大,最大的绝对误差为0.0044°,在1°时相对误差最大,为0.001 8/1≈0.018%。
4 结束语
本文采用MEMS倾角传感器SCA100T的模拟接 口为输出,采用其数字接口实现温度补偿,同时采用基准源和运放驱动作为传感器的电源,提高了传感器输出的精度和稳定性;信号处理时,采用低漂移运放处理电 路和差分模数转换电路,有效提高了信号的信噪比和共模抑制比;采用正弦曲线拟合,有效改善了信号输出的线性度。经过以上多方面信号处理和优化,在测量范围 内系统最大绝对误差为0.004 4°。并且系统集成度较高,体积小,成本低,可以满足地质石油勘探、设备安装、道路桥梁建设等工程应用以及机器人控制、坦克和舰船火炮平台控制、飞机姿态 控制等系统的自动水平调节应用。 |
|