首页
|
新闻
|
新品
|
文库
|
方案
|
视频
|
下载
|
商城
|
开发板
|
数据中心
|
座谈新版
|
培训
|
工具
|
博客
|
论坛
|
百科
|
GEC
|
活动
|
主题月
|
电子展
注册
登录
论坛
博客
搜索
帮助
导航
默认风格
uchome
discuz6
GreenM
»
MCU 单片机技术
»
ARM
» 基于AVR单片机的简易灭火机器人设计
返回列表
回复
发帖
发新话题
发布投票
发布悬赏
发布辩论
发布活动
发布视频
发布商品
基于AVR单片机的简易灭火机器人设计
发短消息
加为好友
苹果也疯狂
当前离线
UID
852722
帖子
10369
精华
0
积分
5185
阅读权限
90
在线时间
277 小时
注册时间
2011-8-30
最后登录
2016-7-18
论坛元老
UID
852722
1
#
打印
字体大小:
t
T
苹果也疯狂
发表于 2015-6-30 16:13
|
只看该作者
基于AVR单片机的简易灭火机器人设计
计算机程序
,
消防队员
,
消防设备
,
化学检验
,
机器人
引言
近年来,随着石化等基础工业的飞速发展,在生产过程中的易燃易爆和剧毒化学制品的使用急剧增长,由于设备和管理方面的原因,导致化学危险品和放射性物质泄漏、燃烧爆炸的事故增多。消防机器人作为特种消防设备可代替消防队员接近火场实施有效的灭火救援、化学检验和火场侦察。它的应用将提高消防部队扑灭特大恶性火灾的实战能力,对减少国家财产损失和灭火救援人员的伤亡将产生重要的作用。
1 设计要求
制作一个由计算机程序控制的机器人,在一间模拟平面结构的房间里运动,找到一根燃烧的蜡烛并尽快将它扑灭。
灭火要求: 机器人不能运用任何破坏性的或危险的方法来扑灭蜡烛火焰。它可以运用类似水、空气等物质,或者使用机械方式,但是禁止使用任何危险的或可能破坏灭火现场的方法或物质。比如,不能通过燃放爆竹产生冲击来使蜡烛熄灭,也不能通过碰倒蜡烛而使蜡烛熄灭。
2 机器人的机械结构
图1 机器人基本结构
机器人的结构包括执行机构、传感器、控制部分及信息处理部分组成。小型机器人为了考虑其稳定性及转向的灵活性,通常其机械结构主要设计以轮式为主,常见有以上四种结构,每种结构有各自的特点,根据本设计的要求,在有轨道的房间里运行,应该选择车体较长, 旋转半径较大的第一种驱动方式,易于寻找轨道。
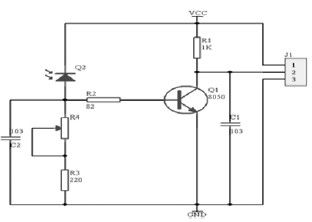
图2 火源探测传感器
3 机器人采用的传感器
本设计所使用的传感器主要有两种,一种是反射式光电传感器,它主要被用于机器人在寻找火源过程中躲避障碍物。这一类传感器比较常见不过多介绍。本设计中要用到的另一种传感器是火源探测传感器,它最主要的元件是用到光敏二极管。根据光敏二极管的特性,自行设计了一种火源探测传感器,电路如图2所示,当没有强光照射时Q2的电流很小,Q1的基极电位很低,三极管处于截止状态,输出2脚为高电平;当发现火源时,传感器有强光照射使少数载流子的密度增加,Q2的电流增大,从而使三极管的基极电位抬高,三极管处于饱和导通状态,输出2脚为底电平,信号传递给单片机。调节R4可以改变传感器的灵敏度。
图3 Atmega48的引脚排列
4 机器人的执行器
本设计的主要执行装置采用的是电机,根据不同的控制要求电机可以分很多种,有直流电机、步进电动机、舵机、伺服电动机等等。各种不同的电机有各自不同的控制方式,和工作特性。本设计的执行器主要包括机器人的行进系统和灭火装置,底盘驱动需要控制简单方便,价格便宜,对控制精度没有过高要求,所以可选择小型直流电动机,额定电压DC9V,额定转速200r/min.该灭火机器人的灭火机构设计采用一个离心水泵,所以同样选择一个直流电动机即可。
5 机器人的控制器
控制器是机器人的“大脑”,是机器人的核心部分,其主要功能有:①机器人行动的规划,使机器人有序的工作;②了解工作环境,采集和存储工作现场的信息,并进行火灾情况的判断和分析;③与外界进行信息的交互。
针对本设计选择控制器的问题,综合比较了51单片机与AVR单片机,由于AVR单片机具有编程灵活,使用C语言编程更容易,并自带PWM功能,支持ISP功能,而且中断源比较多。相比较而言51单片机抗干扰性能差,需要外围电路复杂,没有自带的PWM和AD功能,而且中断源少。综合这些特点及本设计的控制要求和设计思路,最终选择AVR单片机ATmega48作为控制器。
5.1 ATMega48单片机的引脚排列及各管脚功能介绍
5.1.1 信号引脚介绍:
如图3所示。
*输入/输出口线
I/O口线:ATmega48单片机有3组I/O接口,即PB口、PC口和PD口。其中,PB口(PB0~PB7)和PD口(PD0~PD7)为8位I/O口,PC口(PC0~PC6)为7位I/O口。
*AGND 模拟/数字转换器的电源地
*AVCC 模拟/数字转换器的电源
*AREF 模拟/数字转换器的参考电源输入端
*VCC 电源
*GND 电源地
5.1.2 编程软件介绍
ICCAVR 是一种使用符合ANSI 标准的C语言来开发微控制器MCU程序的一个工具,它有以下几个主要特点:ICCAVR 是一个综合了编辑器和工程管理器的集成工作环境IDE,可在WINDOWS 下工作。
5.2 电机控制电路设计
本设计采取PWM调速控制电动机转速,采用Mega48的16位定时计数器1来产生PWM波形,相位与频率修正PWM 模式,可以产生高精度的、相位与频率都准确的PWM波形。本电路采用H型驱动电路改变电机电枢电压的极性,实现电机的正反转,用单片机产生的PWM脉冲波形触发H桥的功率元件,实现对电机的斩波调速。如图4所示:A路PWM从PB1输出接L298的IN1,同时经反向器接IN2;B路从PB2输出接L298的IN3,同时经反向器接IN4.L298的输出OUT1、OUT2接一个电机,OUT3、OUT4接一个直流电机,PWM波经L298放大后驱动电机进行调速。
图4 直流电机驱动电路
图5 H桥工作原理图
L298里面有两组H桥,可以驱动两个小型直流电动机。如图5所示每一组H桥有四个三极
管,当输入为高电平时,T1、T4导通,电流流向如图中实线所示,假设电机为正转;当输入为低电平时,T2、T3导通,电流流向为虚线所示这时电机反转。那么在一个周期内的直流平均功率为正,则电机正转,直流平均功率为负,则电机反转。比如说:80%占空比时,电机正转;20%占空比时电机反转;50%占空比时电机停转。
6 小结
本设计采用性价比较高的AVR单片机ATmega48作为控制器,设计了一款简易的灭火机器人模型。本设计的灭火机器人还存在一定的技术问题,机器人的活动范围受到局限,反应不灵敏以及干扰问题。在探测火源以及灭火方式还有很大的完善空间。而且,一种灭火机器人不可能适用于不同的建筑场合。因此,必须研究不同建筑结构特殊性,有针对性的研制相应的灭火机器人,以使灭火机器人发挥最大的作用。
收藏
分享
评分
回复
引用
订阅
TOP
返回列表
X86
FPGA/CPLD可编程逻辑
MCU 单片机技术
电商论坛
Pine A64
资料下载
方案分享
FAQ
行业应用
消费电子
便携式设备
医疗电子
汽车电子
工业控制
热门技术
智能可穿戴
3D打印
智能家居
综合设计
示波器技术
存储器
电子制造
计算机和外设
软件开发
分立器件
传感器技术
无源元件
资料共享
PCB综合技术
综合技术交流
EDA
MCU 单片机技术
ST MCU
Freescale MCU
NXP MCU
新唐 MCU
MIPS
X86
ARM
PowerPC
DSP技术
嵌入式技术
FPGA/CPLD可编程逻辑
模拟电路
数字电路
富士通半导体FRAM 铁电存储器“免费样片”使用心得
电源与功率管理
LED技术
测试测量
通信技术
3G
无线技术
微波在线
综合交流区
职场驿站
活动专区
在线座谈交流区
紧缺人才培训课程交流区
意见和建议