首页
|
新闻
|
新品
|
文库
|
方案
|
视频
|
下载
|
商城
|
开发板
|
数据中心
|
座谈新版
|
培训
|
工具
|
博客
|
论坛
|
百科
|
GEC
|
活动
|
主题月
|
电子展
注册
登录
论坛
博客
搜索
帮助
导航
默认风格
uchome
discuz6
GreenM
»
测试测量
» 海洋环境地磁场三分量测量仪的设计与实现
返回列表
回复
发帖
发新话题
发布投票
发布悬赏
发布辩论
发布活动
发布视频
发布商品
海洋环境地磁场三分量测量仪的设计与实现
发短消息
加为好友
Bazinga
当前离线
UID
1023230
帖子
5213
精华
0
积分
2607
阅读权限
70
在线时间
158 小时
注册时间
2013-12-20
最后登录
2015-10-22
金牌会员
UID
1023230
1
#
打印
字体大小:
t
T
Bazinga
发表于 2015-1-17 10:13
|
只看该作者
海洋环境地磁场三分量测量仪的设计与实现
测量仪
,
地磁场
,
海洋
一、项目概述
1.1 项目摘要
提出了一种利用安装在舰船上的三分量磁传感器进行地磁场测量的构想,解决了在任意的舰船姿态下,消除测量中舰船磁场干扰的问题。该测试仪采用地磁模块来测量磁场的三分量值,采用3轴陀螺仪来进行任意的舰船姿态所包含的横摇,纵摇和航向三种状态信息,对采集到的数据进行计算,从而得到地磁场的三分量值。同时 该模块还包含压力传感器和温度传感器,可以实时检测海面上的气压以及温度情况。
1.2 项目背景/选题动机
“测地磁消舰磁”是舰载消磁系统所采用的消磁方法,如果能预先测量出舰船航行海域的地磁场值并建立数据库,那么舰船在航行的过程中就可以根据当地的地磁场值来进行消磁系统的电流调整,从而改善舰载消磁系统的控制方法。
目前,地磁场数据的获得主要是通过建立地磁模式组的方法。国际地磁学与高空大气物理协会的一个专门小组每5年公布一次国际地磁参考场,我国则每10年出版一次中国地磁图。这2种地磁场模型的建立,其数据大多来自陆地上的地磁台站,而海洋上的特定地点的地球磁场还受当地的地理构造等诸多因素的影响而具特殊性。这就导致了全球地磁场模型和局部地磁场模型都不能及时准确地描述海洋地磁场。因此,用于舰载消磁系统的电流调整时造成的误差比较大。为了更准确地获得海洋上特定地点的地磁场值,可以在海洋上进行实地测量。
目前在海洋上进行的磁场测量主要是获得磁场总量,但在舰载消磁系统进行跨纬度调整等应用中,需要的却是三分量的地磁场。磁场的三分量值可以利用安装在舰船桅杆上的6轴地磁模块进行测量,但这样测得的磁场值并不是地磁场值,而是一个包含了舰船本身磁场和传感器自身干扰的复杂的磁场值,并且受舰船姿态的影响,其值也是变化的,因此可以利用3轴陀螺仪来测量舰船的3个姿态角,再通过数学建模的方法,从一个复杂的三分量磁场值中分离出地球磁场。
二、需求分析
2.1 功能要求
1, LPR430AL轴陀螺仪(横滚,俯仰)能够检测舰船横摇,纵摇信息并输出,LY330ALH陀螺仪(偏航)能够检测舰船航向角度并输出。
2, LSM303DLH地磁模块能够检测到舰船所在处地磁场信息输出。
3, 最终输出信息还包括经过去除固定干扰之后的地磁场信息。
4, 压力传感器和温度传感器能够实时检测海面上的温度和气压,并输出。
2.2 性能标准
最后经过软件计算结果,地磁场的水平分量和垂直分量的误差不超过50nT,磁偏角误差不超过0.3°。
三、方案设计
3.1 系统功能实现原理(除图片外需有文字介绍)
磁传感数学模型分析
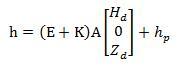
对于装在测量船上的磁传感器来说,其接收的磁场值为:
(1)
式中:E为单位矩阵;K为感应磁化系数矩阵;
分别为地磁场水平分量和垂直分量;A为任意姿态下测量船坐标系与地磁坐标系的转换矩阵;向量 为各种固定干扰量的合成。矩阵A各元素表达式分别为:
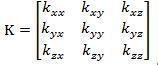
为测量船的纵倾角、横摇角和磁偏向角。矩阵K可以具体表示为:
分析(1)式可以知道,要测量的量
`
`
(实际上要测量的是磁偏角,只是测量出磁航向角
后,就可以与导航设备提供的航向角做差求出磁偏角),向量h是可以从磁传感器中直接读出的
,
首先应该测量出感应磁化系数矩阵K和固定干扰向量
。
2.海上任意地点
`
`
的求解
3.A矩阵的变换形式
对于任意的舰船姿态,都同时包含了舰船的横摇、纵摇和航向3种状态信息,但是为了分析问题的方便,可以把这种姿态看作是舰船没有纵摇和横摇角,并且处于正北磁航向状态的时刻,顺序经历了航向、纵摇和横摇改变的3个独立阶段后形成的。亦即舰船在第一时刻只发生航向的改变,产生磁航向角
(见图1(a));然后在经历一次纵向摇摆,产生横摇角
(见图1(c))。经历这三个状态以后,舰船的姿态就确定了。
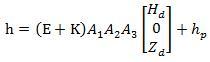
因此,可以将A矩阵写成3个矩阵 相乘的形式,即 ,其中:
4.磁场3分量获得
对于任意航向上、任意测量船姿态下,磁传感器处获得的磁场值为:
(2)
对于具体某一条测量船来说,其K矩阵和固定干扰
一旦测出就是一个不变量,而磁场h值又是可以从三分量磁传感器直接读得的,因此在这里只有
`
`
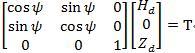
是未知量。故将(2)式作如下变形:
(3)
很容易看出(3)式右侧各参数都是已知的,不妨设
,其中向量T的物理意义是舰船不存在纵横摇时、任意航向下地磁场在舰船坐标系上的投影。这样可以将(3)式写成:
从而分别得到
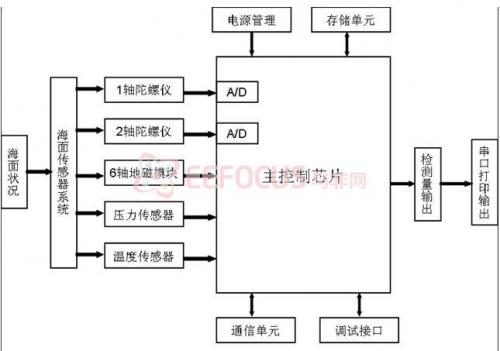
3.2 硬件资源配置
硬件配置图
该系统主要完成海平面上各种信息量的采集,并计算得出需要的结果。该系统主要由以下几个部分组成:微处理器模块、传感器模块、电源模块和检测量输出模块,原理图如上。
处理器选择ST公司的基于ARM的低功耗高性能32位微控制器,采用2个陀螺仪,一个6轴地磁模块,压力传感器和温度传感器,将系统安装于舰船桅杆上,接外部电源。当舰船在海上实地测量时,随着舰船姿态的改变,陀螺仪实时检测到姿态角的信息,同时舰船所在坐标点的三分量磁场被地磁模块实时检测到,信息经过处理器,最终可以得到该坐标点处的实际地磁场信息。
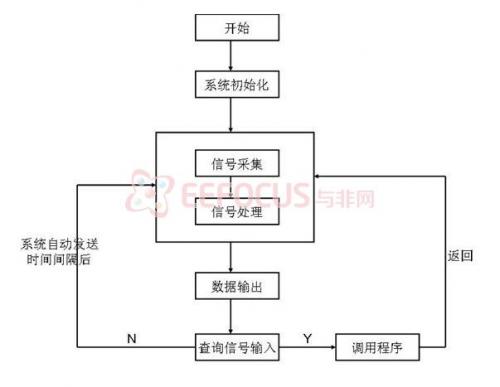
3.3系统软件架构
软件架构图
上图即为软件构架图。首先要进行系统的初始化,在每次断电后重新启动或者复位后进行。传感器模块感知外部信息量,其中对陀螺仪检测到的信号还要进行模数转换,随之将采集到的两组数据存储于处理器内,根据数学模型进行实时分析处理。最后将各感知的初始信号与经过处理之后的结果串口输出。
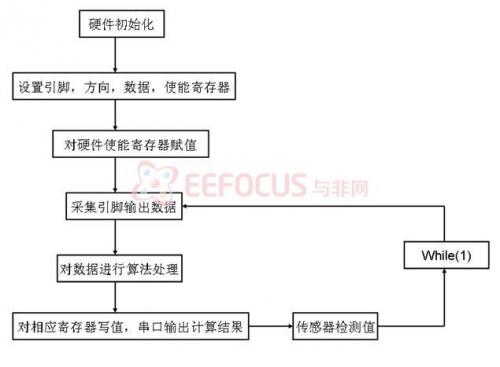
3.4 系统软件流程
程序运行流程图
由于数据处理是不间断工作的,因此在一次数据处理完成并且输出之后,程序再次运行至采集引脚输出数据,进行第2次计算。上图为程序运行流程图。
收藏
分享
评分
the king of nerds
回复
引用
订阅
TOP
返回列表
FPGA/CPLD可编程逻辑
MCU 单片机技术
嵌入式技术
DSP技术
电商论坛
Pine A64
资料下载
方案分享
FAQ
行业应用
消费电子
便携式设备
医疗电子
汽车电子
工业控制
热门技术
智能可穿戴
3D打印
智能家居
综合设计
示波器技术
存储器
电子制造
计算机和外设
软件开发
分立器件
传感器技术
无源元件
资料共享
PCB综合技术
综合技术交流
EDA
MCU 单片机技术
ST MCU
Freescale MCU
NXP MCU
新唐 MCU
MIPS
X86
ARM
PowerPC
DSP技术
嵌入式技术
FPGA/CPLD可编程逻辑
模拟电路
数字电路
富士通半导体FRAM 铁电存储器“免费样片”使用心得
电源与功率管理
LED技术
测试测量
通信技术
3G
无线技术
微波在线
综合交流区
职场驿站
活动专区
在线座谈交流区
紧缺人才培训课程交流区
意见和建议






 (1)
(1) 分别为地磁场水平分量和垂直分量;A为任意姿态下测量船坐标系与地磁坐标系的转换矩阵;向量 为各种固定干扰量的合成。矩阵A各元素表达式分别为:
分别为地磁场水平分量和垂直分量;A为任意姿态下测量船坐标系与地磁坐标系的转换矩阵;向量 为各种固定干扰量的合成。矩阵A各元素表达式分别为: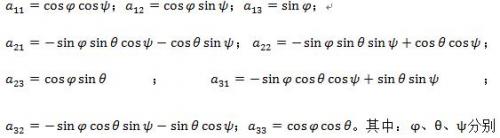
 `
` `
` (实际上要测量的是磁偏角,只是测量出磁航向角
(实际上要测量的是磁偏角,只是测量出磁航向角  ,
, 。
。 (见图1(c))。经历这三个状态以后,舰船的姿态就确定了。
(见图1(c))。经历这三个状态以后,舰船的姿态就确定了。

 (2)
(2) (3)
(3) ,其中向量T的物理意义是舰船不存在纵横摇时、任意航向下地磁场在舰船坐标系上的投影。这样可以将(3)式写成:
,其中向量T的物理意义是舰船不存在纵横摇时、任意航向下地磁场在舰船坐标系上的投影。这样可以将(3)式写成: