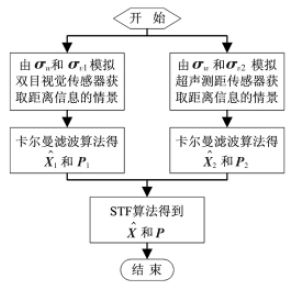
在实际应用中,利用两个CCD摄像机获取视差信息,再根据三角测量原理恢复出场景的深度信息,如此即可测量出障碍物与机器人之间的距离信息,然而,由于CCD摄像机所拍摄的图像是以像元大小为单位的一组离散的数据,故在用双目视觉进行测量时存在最小分辨率误差,仿生四足机器人上搭载的双目视觉传感器的测量误差约为6.8 cm,即σv1 = 0.068 m.
超声测距传感器的发射头发出超声波信号,此信号被障碍物反射后,由接收头接收,根据发射和接收到信号的时间差和声速,即可得到障碍物的距离信息。当探测范围内有目标物体之外的物体存在时,会产生测量误差。仿生四足机器人上搭载的超声测距传感器的测量误差为1 cm,即σv2 = 0.01 m.