1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
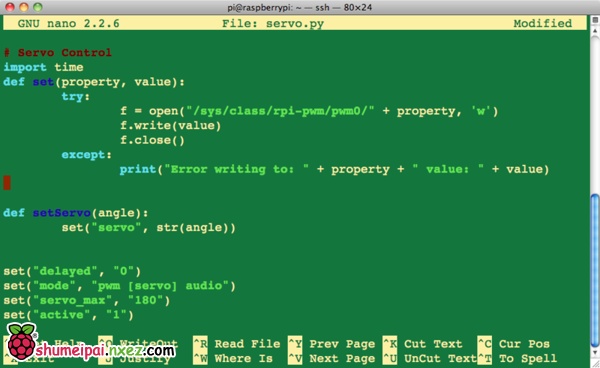
| # Servo Control
import time
def set(property, value):
try:
f = open("/sys/class/rpi-pwm/pwm0/" + property, 'w')
f.write(value)
f.close()
except:
print("Error writing to: " + property + " value: " + value)
def setServo(angle):
set("servo", str(angle))
set("delayed", "0")
set("mode", "servo")
set("servo_max", "180")
set("active", "1")
delay_period = 0.01
while True:
for angle in range(0, 180):
setServo(angle)
time.sleep(delay_period)
for angle in range(0, 180):
setServo(180 - angle)
time.sleep(delay_period)
|