概览这节课我们来学习如何使用Python来控制一个伺服马达。
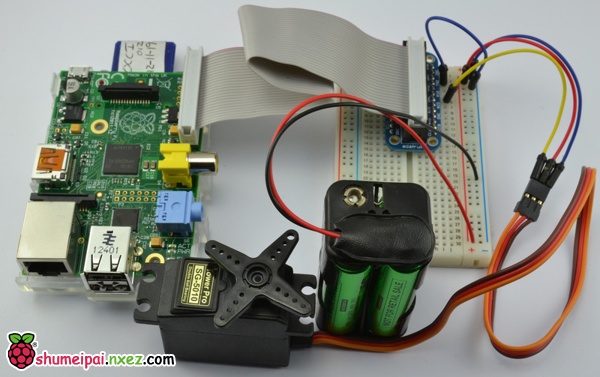
伺服马达受不同长度的脉冲控制。这需要相当准确的定时。树莓派上有一针能通过硬件产生脉冲,而不需要依靠操作系统。Occidentalis系统有一个界面可以使用这一针来控制伺服马达。
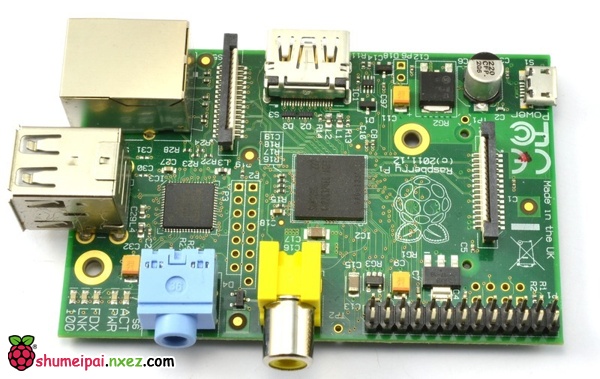
你需要的:- 1个树莓派
 - 1个扩展板和1条26针的IDC电缆
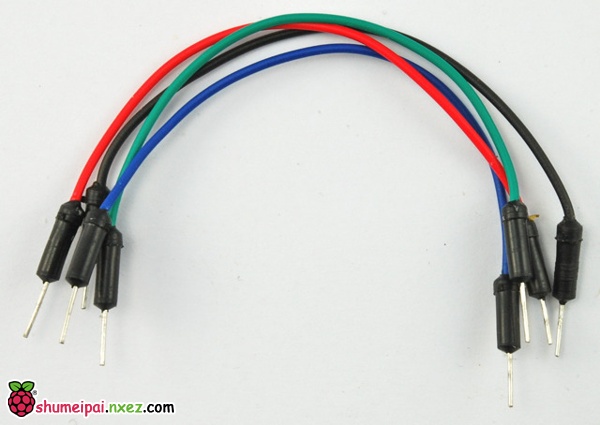
 - 1把公对公的跳线
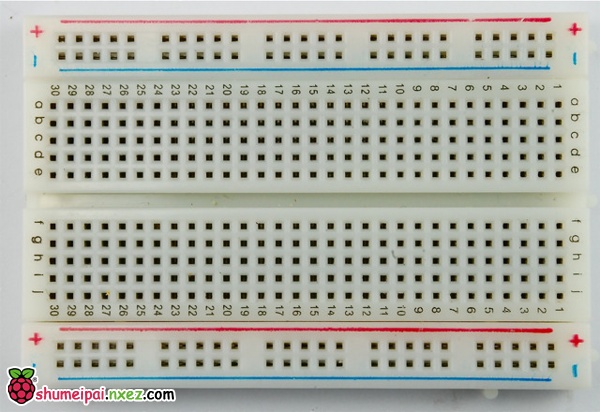
 - 1块小型面包板
 - 1个伺服马达
 - Adafruit Occidentalis 0.2或之后版本的操作系统发行版
 - 5号或7号电池座及4节电池

伺服马达伺服马达的状态由脉冲的长度控制。伺服马达预期每20毫秒接受一次脉冲。如果脉冲的高电平持续1毫秒,那么伺服马达不会转动,如果是1.5毫秒,那它将会转过90度,如果高电平持续2毫秒,那它将会转动180度。
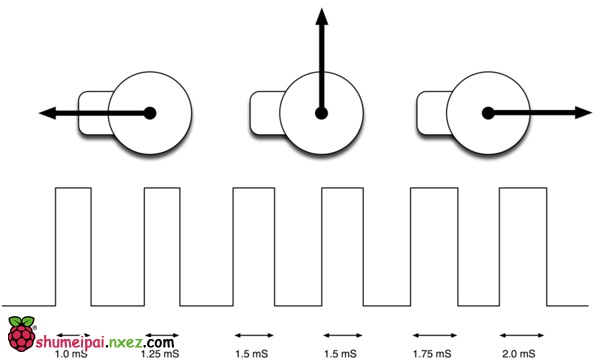
伺服马达的终点位置可能不同,许多伺服马达只能转动大约170度。你也可以购买能”连续”旋转360度的伺服马达。 |




