首页
|
新闻
|
新品
|
文库
|
方案
|
视频
|
下载
|
商城
|
开发板
|
数据中心
|
座谈新版
|
培训
|
工具
|
博客
|
论坛
|
百科
|
GEC
|
活动
|
主题月
|
电子展
注册
登录
论坛
博客
搜索
帮助
导航
默认风格
uchome
discuz6
GreenM
»
汽车电子
» 未来汽车雷达系统设计之路
返回列表
回复
发帖
发新话题
发布投票
发布悬赏
发布辩论
发布活动
发布视频
发布商品
未来汽车雷达系统设计之路
发短消息
加为好友
rise_ming
当前离线
UID
864567
帖子
4448
精华
0
积分
2224
阅读权限
70
在线时间
123 小时
注册时间
2011-12-12
最后登录
2014-8-25
金牌会员
UID
864567
1
#
打印
字体大小:
t
T
rise_ming
发表于 2013-12-3 21:44
|
只看该作者
未来汽车雷达系统设计之路
货车司机
,
记录器
,
仪表盘
,
汽车
,
电子
您深夜还在路上疾驰,急着赶时间,您的电子记录器几乎填满了,您的卡车严重超载。雨下得越来越大。您觉得太快了,但是周围的汽车却一点也不慢。
突然,一阵警报让您精神起来。您本能的透过前大灯来观察前面——什么也看不清。但是您的汽车已经开始了紧急刹车。您撇了一眼仪表盘上的显示,在那里,一片红色的图像越来越大,是一辆翻倒的货车,挡住了弯道周围的车道。您的卡车自己停下了,前大灯照亮了正在努力救出货车司机的救援人员。
欢迎来到雷达辅助驾驶世界。
今后几年中,雷达会在高级辅助驾驶系统(ADAS)的发展中扮演重要角色。随着其角色的扩展,雷达收发器、信号处理和自动避险等功能将使得车载ADAS系统越来越像作战飞机中的战术系统,将对汽车系统设计基础产生很大的影响。
为什么是雷达?
对ADAS的大部分讨论都集中在使用可见波长摄像机的被动视觉系统上。而Freescale半导体公司的雷达系统工程师Ralf Reuter很有说服力的论证了77-GHz雷达的作用。Reuter在一次最近的访谈中谈论到:“重要的一点是,“ADAS传感技术”只有雷达是与天气无关的。而摄像机在识别目标上有优势,雷达更善于探测物体,测量其速度。”Reuter解释到,出于这些原因,很多重视探测和风险分类评估的早期系统会选择雷达。他指出:“在欧洲,对卡车紧急刹车系统有很大的需求。它是基于雷达的。”
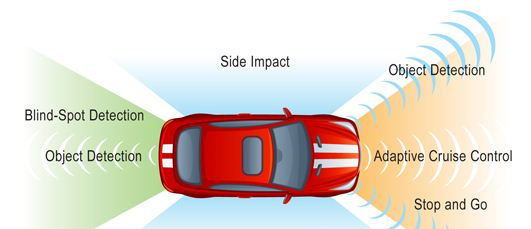
雷达系统会启动一个简单的中距离系统,向前直视整条道路。但是,很快会发展到多传感器系统,同时包括长距离前视和短距离360度危险评估功能,如图1所示。
系统的硬件结构原理图
图1.雷达系统能够进行前向搜索,以及观察车辆四周。
虽然光学视觉系统非常成熟了,而雷达系统的优势会使其更加完善。Reuter预测,在不久的将来,具有目标识别的多摄像机复杂系统能够融合视频和雷达数据,对周围的世界建立动态模型。
采集信号
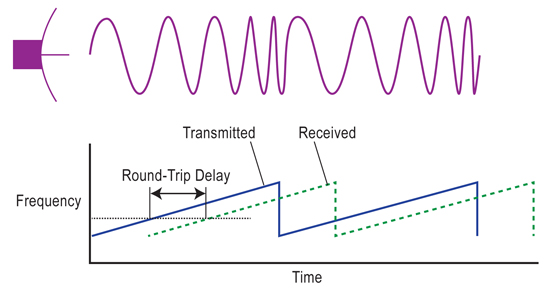
理解雷达对汽车系统设计的影响是从理解传感器开始的。大部分汽车雷达设计都愿意使用24或者77-GHz自由频段。发送器一般是频率调制的连续波(FMCW)设计,它发出“啁啾”:在频域的快速变化,如图2所示。
系统的硬件结构原理图
图2.车载雷达将使用啁啾类型的FMCW。
Reuter解释说:“FMCW最大的优势是简化了对反射信号的理解。您可以从反射频率中直接读取目标范围,从多普勒频移中得出速度。与脉冲调制方案相比,产生CW不太复杂,理解起来也很容易,很可靠。这是车辆厂商最关心的问题,他们觉得花在改进ADAS上的每一个欧元都直接来自企业利润。
接收信号也需要低成本新颖的设计。通过采集方位信息来收集反射信号需要机械扫描天线或者相控阵天线,并且结合了数字聚束算法。天线后面一般是具有很多通道的零差接收机,这是天线设计所需要的——用于简单旋转天线,一个阵列有16个。
Reuter说:“接收机输出是DC-20-MHz频带的基带信号。”设计实现具有良好方位角分辨率的系统会有8至16个通道,需要8至16个高速模数转换器(ADC)。
从啁啾中提取信息
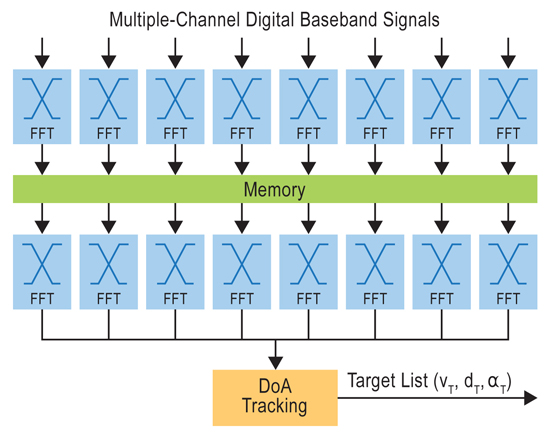
来自每一通道的数字基带信号流入到快速傅里叶变换(FFT)模块中,实现长度高达2K采样的变换。Reuter说:“过去,执行FFT意味着需要很多FPGA。今天,发展趋势是集成了浮点DSP加速器的32位微控制器。”聚束系统可以使用两块FFT从信号中提取出范围和速度数据,如图3所示。
系统的硬件结构原理图
图3.聚束以及范围和速度估算的FFT配置。
实际上,这一前端处理单元处理输入的多个FMCW模拟通道,形成方位角/范围/速度数组的数字码流。这一数据流进入到一个或者多个CPU内核中,由其他加速器所支持的软件会推断出在车辆周围是否有物体出现,物体的位置以及属性。
Reuter解释说:“您需要识别出目标,把它们从背景中分离出来,选择最关键的一个。您可能需要处理200个目标,因此,计算会非常复杂,特别是提取出角度信息。”
系统的物理配置也越来越复杂。Reuter说,目前传感器本身的处理工作很少。相反,ADC有专用模拟接口,信号处理硬件的专用数字接口用于FFT,微控制器还有其他的接口来提取出目标,并对其进行分类。目标信息被输入到车辆控制区域网(CAN)或者FlexRay总线上,中央CPU集群对其进行解释和分析。
整条流水线都有很大的带宽和延时要求。Reuter说,CPU对数据的解释一般以图形显示的方式呈现给司机,即,他通过挡风玻璃能够观察到的前端多功能显示屏。这种混合显示要求最多不能超过50-ms的更新间隔,以及更具挑战性的50-ms最大延时。否则,图像会很不平稳,通过挡风玻璃的图像会有滞后,可能导致司机误判。
随着系统从一个传感器发展到支持聚束功能的多个传感器,以实现摄像机数据融合,互联体系结构也发生了变化。Reuter说:“有使用以太网来降低成本的需求。”但是,系统仍然要求实时工作,带来了怎样保证以太网实时性的问题。
到处都是干扰的未来
只要周围没有人使用雷达,车载雷达一般都比较可靠。但是,这有很明显的问题:越来越多的车辆使用了雷达,因此,设备之间不可避免的会出现干扰。Reuter说,您可以改变调制速率以减小干扰,最终,采用编码跳频码型来替代简单的频率变化,因此,每一辆车都能够识别出自己的啁啾。这种变化能够保持早期系统的体系结构以及大部分硬件不变,但是要实现复杂的提取和分析功能,则要求每一系统能够识别出来自其天线的反射信号。
而且,还有一类不容易解决的问题:固定设备所产生的干扰。Reuter提醒说:“马上带来的问题是,欧洲的隧道使用大功率雷达来识别车辆。他们的发射器会导致车载雷达无法工作。”
一个更科学化的敏感问题是,天文物体辐射频谱的关键部分位于77-GHz频带。在人口密集区,越来越多的车载雷达会强烈干扰天文射频信号。
Reuter提醒说:“在日本已经出现了要求关掉射频天文望远镜1,000公里范围内发射器的法规。这有可能覆盖整个国家。”
啁啾调制器、数字聚束、目标识别、危险评估、防护跳频、干扰等——这些听起来都像是新型作战飞机的情形,而不是货车和轿车。实际上,ADAS继承了军事系统的很多技术。这并不奇怪,当天气越来越糟,车越来越堵时,这的确像是一场战争。
收藏
分享
评分
回复
引用
订阅
TOP
返回列表
电商论坛
Pine A64
资料下载
方案分享
FAQ
行业应用
消费电子
便携式设备
医疗电子
汽车电子
工业控制
热门技术
智能可穿戴
3D打印
智能家居
综合设计
示波器技术
存储器
电子制造
计算机和外设
软件开发
分立器件
传感器技术
无源元件
资料共享
PCB综合技术
综合技术交流
EDA
MCU 单片机技术
ST MCU
Freescale MCU
NXP MCU
新唐 MCU
MIPS
X86
ARM
PowerPC
DSP技术
嵌入式技术
FPGA/CPLD可编程逻辑
模拟电路
数字电路
富士通半导体FRAM 铁电存储器“免费样片”使用心得
电源与功率管理
LED技术
测试测量
通信技术
3G
无线技术
微波在线
综合交流区
职场驿站
活动专区
在线座谈交流区
紧缺人才培训课程交流区
意见和建议