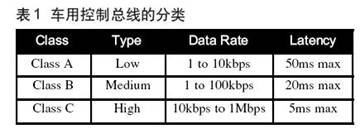
CAN 具有低、高速两种实施方案,使用不同电压在一对导线上进行通信,通常称为高速物理层和低速物理层。当两根导线中一根因短路或一路发生故障时,低速体系结构变为单线工作体系结构(所谓离线地)。由于电路需要具备这一功能的缘故,这种体系结构在超过125Kbps总线速率时,其实施成本是十分昂贵的。因此,125Kbps是高速与低速CAN的分界线。图1表示CAN支持其它车用网络的连接方法。
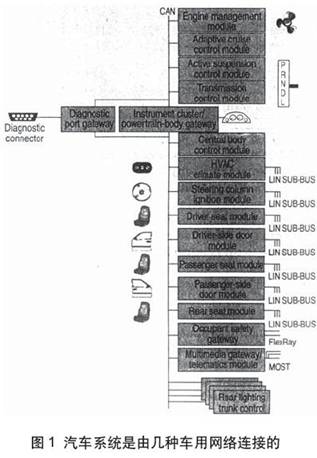
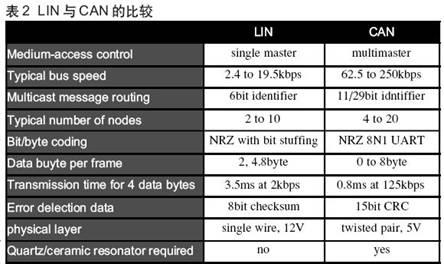
对某些机动车应用,如车体电子系统中的马达控制,甚至可以使用更低的总线。本地互连网(LIN)是一种UART基、单主、多从网络体系结构,原是为汽车传感器和执行器网络应用开发的。LIN为连接车内马达、开关、传感器和车灯提供了一种廉价的网络备选方案。LIN主节点连接LIN网络和高级网络(如 CAN),将网络的作用一直延伸到每个传感器和执行器(表2)。
在配备齐全时,导线驱动的系统需要大量的功率。术语“用导线(by-wire)”表示控制系统已完全取消了机械或液力连接,而在控制单元之间采用电子连接驱动电机执行器。用导线驱动包括导线调节,用导线刹车,用导线变速以及用导线驾驶,特别是对自动停车系统。