|
 
- UID
- 864567
|
2.3 神经网络在本控制系统参数整定和优化过程中的应用
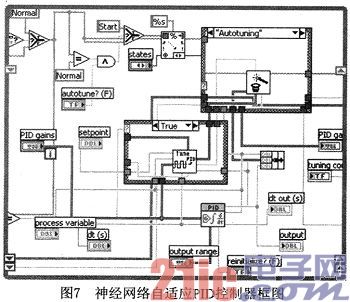
图7为用LabVIEW编写的神经网络模糊自适应PID控制器的框图,主要由自适应向导、自适应模块、以及PID控制模块三部分组成。自适应向导为用户提供一个用户友好的界面,用户可以介入自适应调节过程,并对一些参数进行设定。自适应模块根据设定自己过程参数,再按照神经网络自适应算法对PID参数进行自动在线整定,整定完成后的PID参数对现场设备内的参数进行修正。
但实际的对象阶跃响应实验结果表明,上位箱液位对象的实际特性与理想的一阶惯性环节差异较大。这一方面是因为由于受到硬件限制,进水阀的线性以及灵敏度不够高,而另一方面也是因为干扰的缘故,水泵的启停所造成的冲击等。另外由于通信网络所产生的传输时间延迟,该对象还要附加一个纯延迟环节。
直接采甩Ziegler-Nichol整定方法时,由于对象阶跃响应曲线不够精确,实际的被控对象也不是一阶惯性环节,所以整定效果不太理想。实验测得的闭环阶跃响应曲线如图8所示。

从图8可以看出,当采用常规的整定方法时,整定效果不太让人满意,系统的超调过大,调节时间也太长。
而且当由于别的干扰因素,如气温上升等而影响到系统的特性参数时,还需要重新测定对象的开环阶跃响应曲线,费时费力,缺乏自动性。
当采用基于神经网络模糊PID控制算法的在线整定方案后,系统的闭环阶跃响应曲线如图9所示。
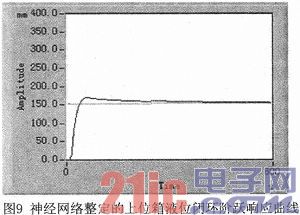
从上面实验测得的响应曲线可以看出,采用神经网络模糊自适应控制算法后,控制指标有了明显改善,超调减小,稳态精度也得到了提高。更为重要的是神经网络模糊自适应控制算法可以适应对象动态特性参数变化,并且可以在线自动整定,从而具有较好的应用价值。
3 结束语
网络技术作为信息技术的代表,其与控制系统的结合将极大地提高控制系统的水平。网络化控制技术作为控制、网络和计算机多种技术交叉融合的产物,它的发展是控制系统日趋复杂化的体现,其理论基础跨越多个学科,应用范围遍及多个领越。作为一个新兴的研究领域,网络化控制系统很多问题的研究仅是一个开始,还存在着大量课题有待进一步的深化研究。
本网络化模型装置将以太网与传统工业控制融合在一起形成新的控制网络,在保证控制系统原有的稳定性、实时性等要求的同时,又增强了系统的开放性和互操作性,提高了系统对不同环境的适应性。 |
|



