|

- UID
- 1023166
- 性别
- 男
- 来自
- 燕山大学
|

多年来,采用行人航位推算(PDR)技术的室内定位系统受到了学术和商业领域的广泛关注。现有的各种传感器解决方案通常是使用加速度计来计算步数,并使用磁力计和/或陀螺仪来测量行走方向的变化。测量准确率在行进距离[1]的0.5%到10%之间。但所有这些方法都要求用户从始至终保持身体平衡,以确保移动感应设备的平稳,就如同行走的同时还要保持一块蛋糕的平衡一样,也就是所谓的“蛋糕步”。
但是智能手机的室内定位系统要能够让用户自由移动,且无论手机如何放置都能提供合理的结果。通过开发传感器算法来进行室内定位是极为复杂的,这在一定程度上是因为算法会受下列因素变化的影响,且随着环境的实时变化,系统还必须同时兼顾到这些因素。
地磁异常随处可见。定向的不确定性是造成定位出错的主要原因。尽管使用磁力计可以避免定向过程中出现的“航向漂移”问题,但智能手机通常在一天中[2]60%的时间里都会出现地磁异常。如图1所示,当平稳地拿着手机经过一根普通的电线杆时,可以看到,航向出现摆动,变得极不准确。而通过算法的精心设计,可以检测到这些异常并进行弥补,使定向更加精准(如图中蓝线所示)。
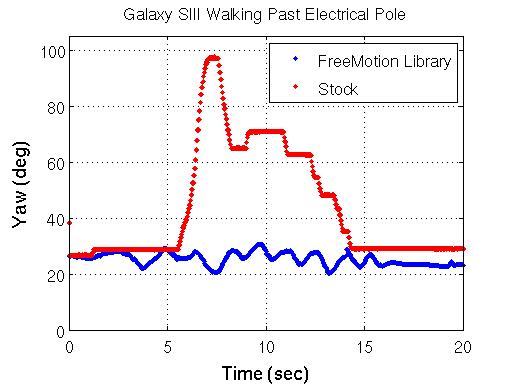
图1.当经过电磁干扰源(如电线杆)时,一个普通缺省设置的安卓手机的定向功能会变得很差(红线)。在向同一台手机植入并安装Sensor Platforms公司的FreeMotion Library后,定向功能变得精确(蓝线)。
Yaw (deg):航向偏移量(单位:度)
Time (sec):时间(单位:秒)
Galaxy SIII Walking Past Electrical Pole:Galaxy SIII经过电线杆时的航向偏移
智能手机中的消费级惯性传感器噪音大且不稳定。一些学术文章中将加速度计噪音达到1mg且陀螺仪偏置漂移达到每小时20度(与军工级传感器相比相距甚远)[3]的惯性测量单元(IMU)称为低质IMU。然而,即便智能手机中最好的传感器,也会产生比该值多一到两个数量级的噪音。因此,这种噪音累积会迅速导致严重的定位错误。在提高传感器硬件性能之前,需要引入一些算法来减少航位推算错误,例如运用PDR技术来计算步数。
不同的携带模式需要不同的算法。PDR技术能够通过检测步数来减少集成错误。然而,仅是用手在空中简单的摇晃手机也同样会产生类似于行走的运动。这一问题在以往已经得到解决,例如,对第一响应者来说,可以将传感器模块绑定在衣服或鞋子上的特定位置,这样就可以避免该问题并提供可靠的结果[4]。
然而,这一方案并不适用于智能手机平台。因为人们通常不会把手机放在鞋子里,当然也不会像拿蛋糕一样小心翼翼地携带手机,相反,在人们行走的过程中,手机可能会放置在任何地方:口袋里、耳边、钱包里或直接拿在手上。因此,无论手机放置在哪里,智能手机的PDR功能必须能够跟踪定位用户的位置。
图2展示了人们在行走时,手机在三种不同的携带方式下传感器信号的差异,这三种携带方式分别是:放在口袋里、握在手里正面朝上(看着屏幕)和握在手里侧面朝上。尽管信号具有相似的特性,然而信号幅度、本底噪声、总机械能甚至曲线本身的形状都会随传感器位置的变化而不同。而经过精心设计的环境感知算法可以可靠地区分用户是将手机放在口袋里、握在手里正面朝上、握在手里侧面朝上或是从一个位置换到另一个位置。这类算法运用传感器数据的多个方面来构建对周边环境的一致认知,掌握手机所处的位置后,就可以适时地使用正确的PDR算法。
图2.行走时的加速度计信号图,比较三种不同的携带状态:放在裤兜时一条腿的信号强于另一条腿的信号;握在手里正面朝上时,两种信号几乎相同;握在手里侧面朝上时,手臂摇摆等因素导致了一些不规则变化。
Vertical acceleration while walking:步行时的垂直加速度
Pant pocket:放在口袋里
Hand front:握在手里正面朝上
Hand side:握在手里侧面朝上
Time (sec):时间(单位:秒)
行进方向不同于移动设备的朝向。多数传感器算法都会注重移动设备的朝向,但实际上真正重要的却是用户移动的方向。这种行进方向称为“方位”,它和方向是两个概念。方位是区分PDR和步数计算的因素之一。通过从设备方向中辨别出用户的行进方向和设备朝向,算法能够得出按圈行走实际上会回到起始点。
PDR技术是强大的室内定位工具,然而,其运行的环境却非常复杂。以往的解决方案都是要求用户在携带PDR系统时走“蛋糕步”。而如今,引入新环境信息集合的算法已经解决了诸多类似问题。相信这些新的系统定能帮助定位服务走出困境,走向辉煌。
参考文献
1. Jimenez, A.R., F. Seco, C. Prieto and J. Guevara, “A Comparison of Pedestrian Dead-Reckoning Algorithms using a Low-Cost MEMS IMU,” WISP 2009 - 6th IEEE International Symposium on Intelligent Signal Processing.
2. Chen, I., J. Steele, “What do Smartphone Sensors Sense All Day?” EDN, Dec 2012. (http://www.edn.com/design/system ... sors-sense-all-day-)
3. Tian, Y., Y. Li, C. Rizos, and Z. Ren, “Three-loop Integration of GPS and Strapdown INS with Coning and Sculling Compensation.”
4. B. Beauregard, “Omnidirectional Pedestrian Navigation for First Responders,” in 4th Workshop on Positioning, Navigation and communication, WPNC 2007.
原文作者:Jim Steele |
|



